Cool thx for the link.
Only being able to use 9" props on a aircraft that size is a bit of a pain, but it can probably be optimized fairly well. Would be good to get an idea of current draw at faster cruise speeds whenever you get to calibrating the sensor (this would need to be prop pitch optimised).
As mentioned on DIYD this would be a prime candidate to make into a quadplane. Although you could do what everyone else seems to do for these conversions, namely place a CF tube/flat under the main wing join, parallel to the fuselage, I’d rather opt for the H-Quad setup, which means you can put the motors on CF tube/flat bars coming out of the fuselage itself. Something like this:
The main advantage of doing the arms like that is that the wings are not in any way loaded up in hover as the fuselage takes all of the hover lift directly. That means you don’t have any torque steering effects as the quad structure is much more rigid than on the wing. The other advantage is that the ESC’s and cabling lengths are less and are routed straight into the fuselage, saving weight and making it easier to setup. Also, depending on the mounting position, you can also make it de-mountable. We made two 3D prints and mounted one under and one on top of the fuselage foam like this. That’s two screws and 4 plugs per arm to disconnect, so it only takes a minute to convert back to normal (if you wanted to!).
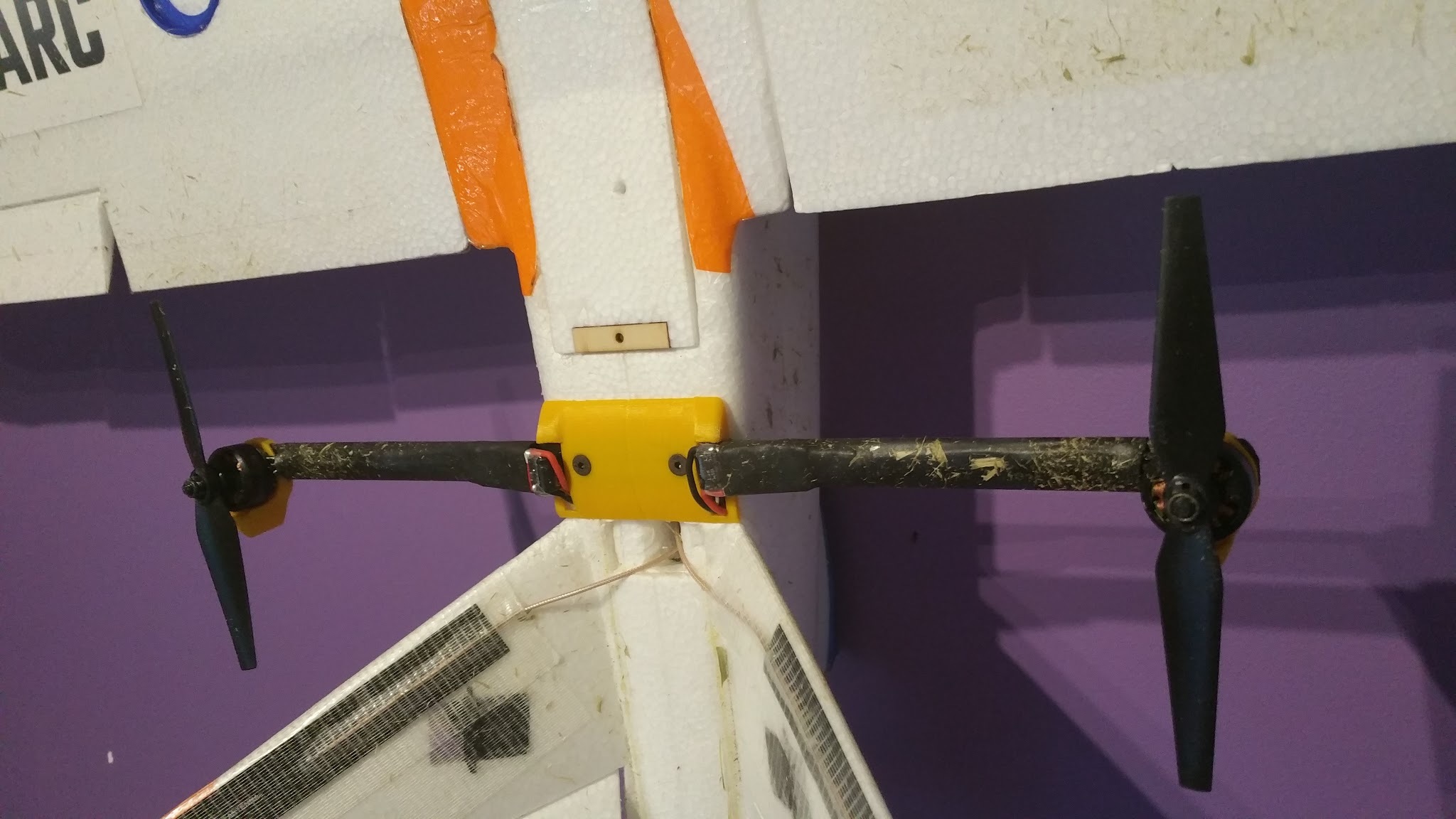
As you can see on that photo we used a 3mm CF flat bar, then attached the motors directly via a angled shim (3D printed), with the cables laying on the CF bar and the ESC’s mounted on the inside of the arms. Then you just have to heat shrink it in such a way it stays as flat as possible. Note the frontal area with a CF flat bar is less than a round CF tube, and it means the motor/ESC mounting is much easier and more compact than using a tube with brackets etc. The length of the quad arms is also variable, but we found making it close to fuselage didn’t impact roll control much. You might say that mounting the quad arms sideways across the airflow creates more drag, but we found that by not disrupting airflow around the wing, by being able to place the arms out of the wing airflow, was actually better. Plus the arms act as mini canards if done right (ie you get some lift for your drag at least).
The other thing that is worth doing is making sure you have about 5-7degrees of forward pitch on your hover motors when they are mounted. We done this with the yellow 3D printed shim (with little airfoil behind it) and it makes a huge difference in hover with windvaning on, and in light to high wind. Like that the AoA of the main wing is greater, resulting in more lift being produced by the wings at low airpseeds in hover, plus it avoids the wing from producing downwards lift in wind and whilst hovering. Also together with forward motor assist in hover means that the windier it is the more the wings assist in lift whilst in hover, to the point that the aircraft might not descend in high wind in qloiter at all. 
Another thing that happens with a quadplane is that with quad assist on and setup correctly, it becomes very difficult for the aircraft to tip stall, because the quad motors produce enough lift at any forward speed to maintain desired attitude. This together with the quad motor forward pitch angle, makes for a very floaty and stall insensitive airframe.
As for quad propulsion, depending on the layout as a quad or octoquad, you can probably get away with relatively small motors and ESC, especially so if you only want short VTOL and hover times because you want longer forward flight times. Have a look at KDEdirect or Cobra motors for mini quad racing, you’ll be probably surprised to see dinky little 2206 motors doing some 1.7kg of lift on a 6’ prop each nowadays.
Another point is that if you do use VTOL, you can then tune the forward prop just for cruise and neglect static thrust for takeoff nearly altogether. (forward prop pitch for cruise should equal drag at that velocity and not produce any more thrust than that). You’ll find that optimizing the forward prop like that will result in less power used, and adding extra batteries in longer range and faster speeds than is possible without the quadplane conversion.
Let us know how you go if you try it. 


 , watching your big Talon inspired me to convert my old Skywalker 1660 perhaps with detached quad to fly the two ways as another possibility,
, watching your big Talon inspired me to convert my old Skywalker 1660 perhaps with detached quad to fly the two ways as another possibility,