I use the DO_SET_CAM_TRIGG_DIST command to drop every 7 meters a small bowl for an agriculture project. I noticed that the number of commands doesn’t match the target value. The flight distance was 2600 meters. So the drone should drop around 378 bowls. If I fly with 8m/s it drops only 220bowls. with 6m/s around 323 bowls. This results in every 7.5meter for a command with 6m/s flight speed.
The CAM_DURATION is set to 4 (1/10s)
How is this possible?
I checked the numer of commands on the Mission Planner flight screen. I hope those values are correct.
You haven’t mentioned what release mechanism you are using and it’s latency.
We struck similar issues when pushing our cameras a bit hard, not enough recover time between shots.
So just how quickly can you release your bowls?
Without details I am assuming you have a servo release or the like.
How fast is the servo?
In the air there will be variances in speed and timing.
How close to the limit of response is your mechanism?
The release mechanism has a cycle time of 0.8s. So 8m/s flight speed should be possible. I use a servo for the mechanism. it moves 0.4s in one direction, and 0.4s in the oposite direction. Then the cycle is done.
For the test I didn’t physically drop bowls. I only view in the Mission Planner flight tab the number of commands (photos).
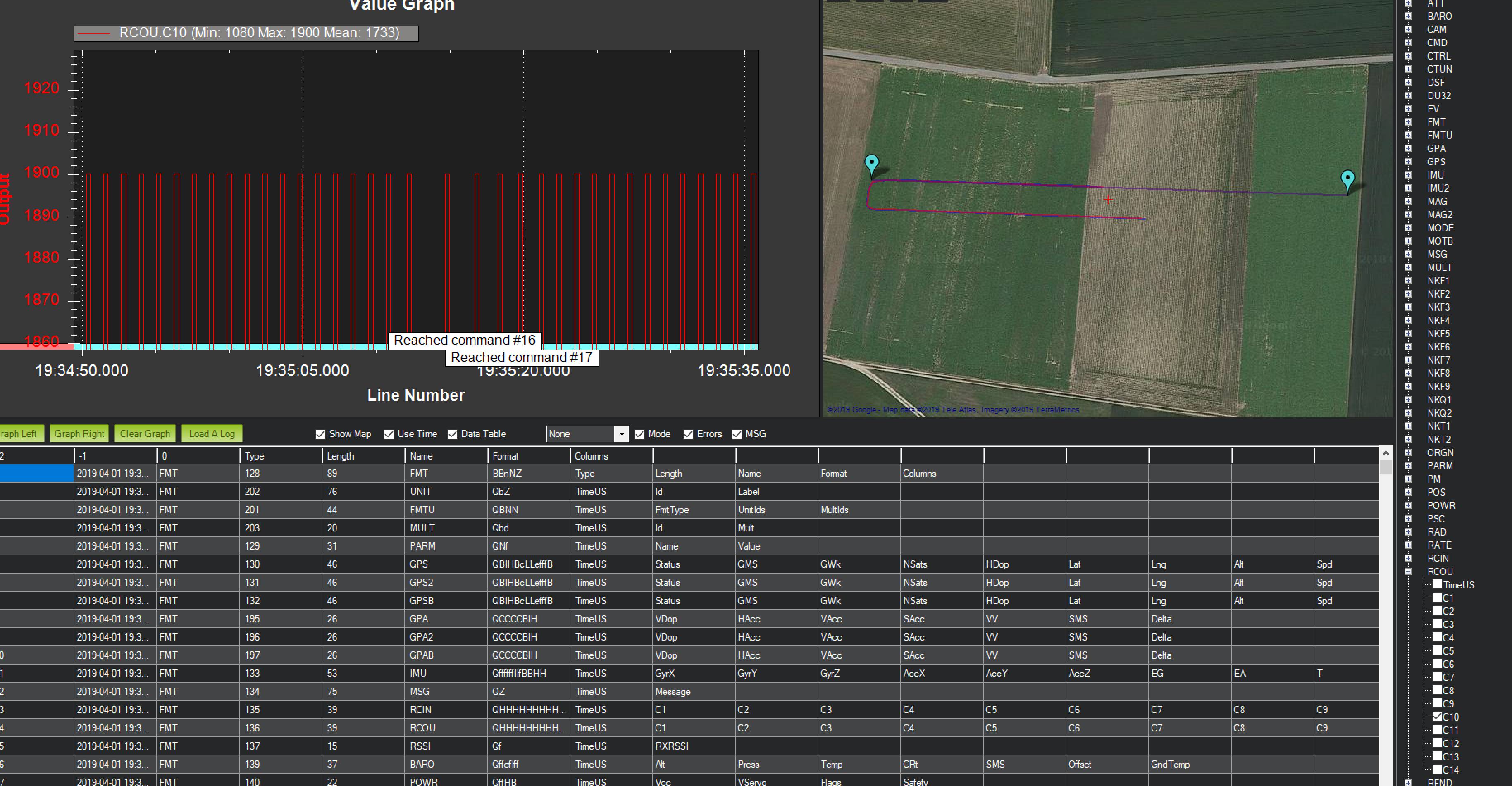
I have a quick look into the data flash log. I really don’t understand why every 7.5 meter instead of every 7 meters a command send to the release mechanism. The state with pwm low is at least double the time of the pwm high state. So in my opinion It can’t related to fast flight speed in combination of too slow cycle time of the realease mechanism.