Hi,
I had this 10 year old silverlit xufo quadcopter frame, a beaglebone blue and a Lipo 2s battery lying around so I thought I get it to fly with Ardupilot. Needed some editing to control the brushed motors, but it worked well. Sadly the first brushless motor died not long after I tuned the PID. (Yes, that was obviously going to happen…)
So I replaced the original motors with Hacker brushless A10-9L kv1700 and Blheli_32 STM32F051 ESCs.
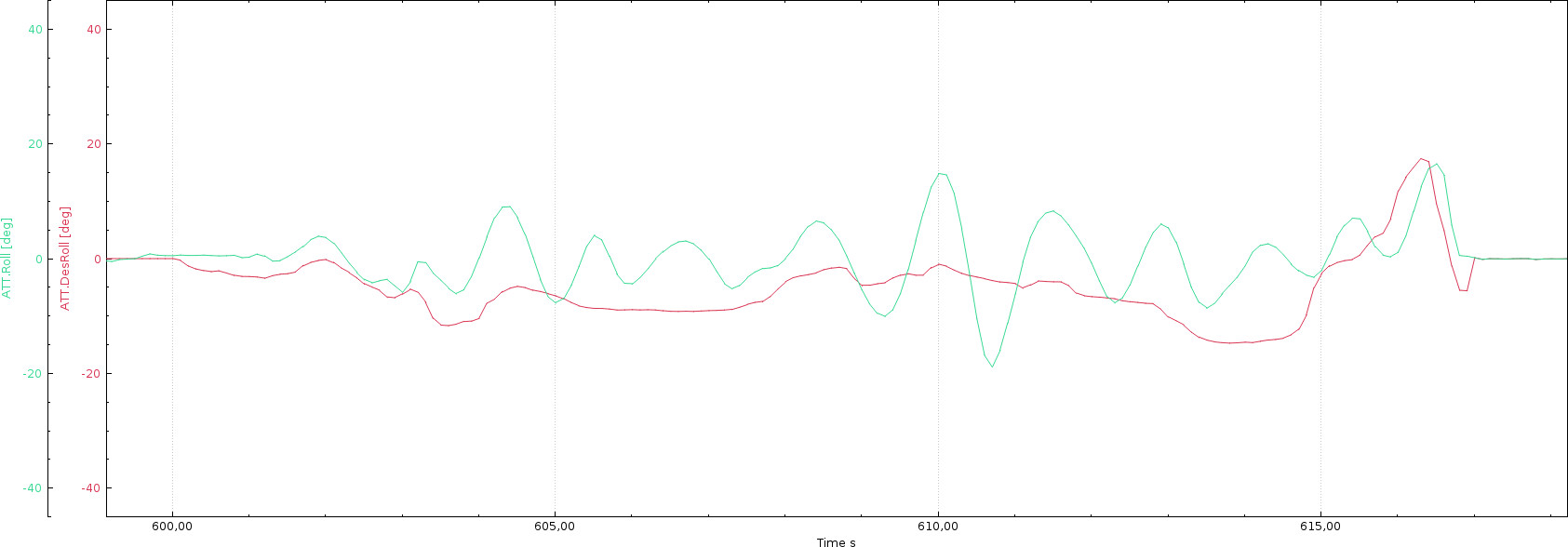
Problem is I can not tune the PID on them. Even with a low P=0.01, I=0.0001, D=0001 it wobbles a lot:
And I can not set the Proportional term any lower since I can barely control it. I suspect the frame is basically ok as is the mounting of the beaglebone blue flight controller since it worked with the brushed motors. Since I’m currently out of ideas it would be nice if someone could provide a hint.
MOT_PWM_TYPE is set to DShot150
Log is here: http://vontaene.de/bruchpilot/19-10-22_17-10-54.bin