Hi Ed,
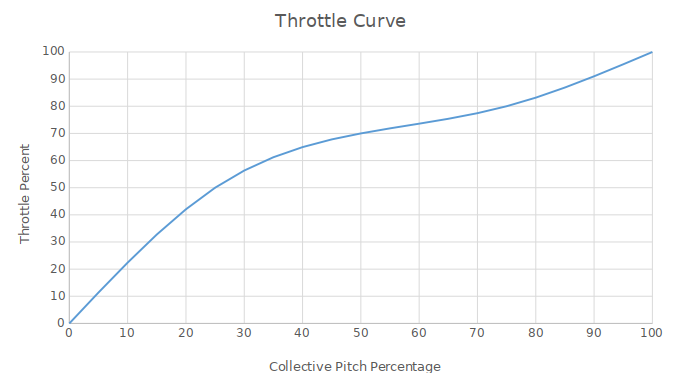
No, I understand what you’re saying. I think your throttle curve is a little aggressive for an electric helicopter. You have a 0-50-70-80-100 curve.
Now, pistons and turbines will typically use full throttle at 100% collective load. But electrics usually don’t because electric motor can produce 100% torque at zero rpm (if the motor is stalled). Most electric helicopters will like to fly with the ESC at or above 75% throttle (a setting of 750 in ArduPilot). Higher headspeed will be maybe 85%, etc…
So the procedure involves setting the throttle curve to match load to maintain a constant headspeed no matter what the collective load is. At the bottom of the throttle curve you can have an “idle-down” that reduces power as you pull the pitch into the slight negative range (called Flight Idle in full-size helicopters) - which I actually recommend because it prevents hammering the helicopter into the ground in negative pitch range with the head speeding up when you set down, and you never fly at full power at zero pitch anyway. The only time you will use full power in negative pitch with RC is to fly inverted, and that’s not the case here.
So the problem you currently have is that when you throw the throttle hold switch you have the bottom of the curve set to zero so if the collective lever is down the motor won’t start. It advances to 50% throttle by the time you move the collective only 1/4 of the way up. This is going to be very rapid acceleration of the rotor with an electric and it will cause 'er to torque-twist on the ground.
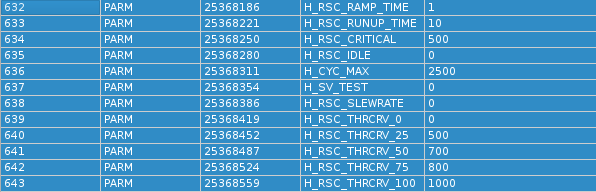
So what I would do, assuming your helicopter likes to fly at ~75% throttle, is set the throttle curve to something like 25-50-75-75-80 (add an extra zero for ArduPilot’s settings) to start with. You can top the throttle curve out at 80% with an electric because electric motor will produce full rated power (in watts) at 80% throttle if you try to lug it.
So, now. You see a couple other settings there - the H_RSC_RAMP_TIME and H_RSC_RUNUP_TIME. What these do is ramp up your throttle for what ever seconds you set them to.
So, let’s set the ramp time to say 10 seconds. With the collective all the way down you’re going to have 25% throttle with the above curve. When you throw the throttle hold switch it ramps smoothly up to 25% throttle over 10 seconds. Not all ESC’s will start right away at just off zero throttle. So when you throw the switch it may not do anything for the first couple seconds, and then start to turn and ramp it up to whatever you have for collective position on your stick. If you want, you can move your collective to zero pitch (which will be about 30% throttle with the above curve), and set it ramp it up over 20 seconds if want it to spin up slower and smoother.
The runup time must be set at least 1 second longer than ramp. So if you set ramp to 10, set runup to 11. The runup time only really applies to pistons and turbines where we’re engaging the clutch and spinning huge mass in the rotor that takes more time to get up to speed and warm up the engine, etc… Electrics are pretty much “push button” - they will runup at the same rate as ramp within a couple seconds.
So those are the settings you can play with to get the startup you want. Once you get it starting smoothly, then adjust your throttle curve points to get the headspeed you want. But is very rare that an electric would use 100% throttle on the curve unless you want to run it balls out at like 90% throttle in hover and punch it to 100% on a hard pitch pull to maintain headspeed. Again, the reason for this is that electric motor will produce 100% torque at less than 100% throttle if you lug it. Piston engines produce 100% torque at wide open throttle, pulled to the knee of their torque curve. Turbines produce 100% torque at max fuel flow to N1 (the gas generator) with N2 (the power section) at 100% rated speed.
So each type of different powerplant requires a different throttle curve.
Once you get it running perfectly, now adjust these (and I see you have been adjusting them)

The 2 & 3 will determine where the collective stick position is in hover. Make those two values about 80-100 apart and move them up or down as required to move the collective stick position in hover to get it to hover at mid-stick in Stabilize. You must have your headspeed nailed in before setting these, as changing the headspeed changes how the IM_STAB_COL’s interact in Stabilize flight mode. Ideally you want your helicopter to hover from 4.5 to 5.5 degrees of pitch with symmetrical blades. This provides the best efficiency in power and performance (lift/drag ratio) for symmetrical airfoils. Theoretically you can hover at 7.5-8 degrees of pitch and get more flight time with an electric. But the helicopter will handle like a slug and be unstable, and will autorotate about as good as a brick.
Hope this all helps. It’s a fun learning experience to tune a heli up with a throttle curve. It’s real traditional helicopter stuff like the old days, before they came up with “push button” ESC governors and all that for electric helicopters.