Hi guys, I was hitting 10-15mph winds today on my 680mm frame (DAYA) on Cube. I had previously auto-tuned and drone flew solid. Today I tested it on an automated survey flight and it started to wobble like below. I instantly put it into acro and brought it down. Any common PIDs I should start tweaking? I’ve done some research and it looks like D term should help (in this case for pitch and roll). Thanks!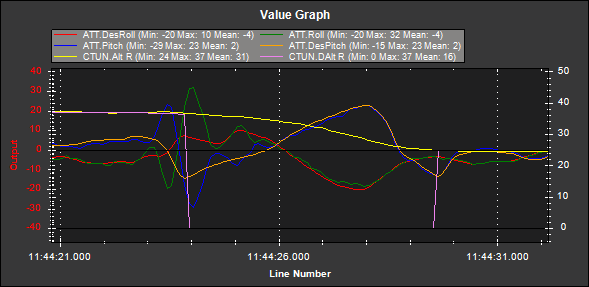
Same issue! Copter wobbly in roll axis until some input is given! Arducopter 3.6.6
Mine was on auto mission, descending. I think it is prop wash. I’m going to try to tune D term.
Funny enough, I talked this over with someone who knows nothing about drones and I had a moment of light. Why are my DesRoll/Pitch values not just level flight? This must be what they call I-term buildup. I researched it and tested in flight, boom - solved it. Source: https://quadmeup.com/how-to-tune-pid-i-term-on-a-quadcopter/