Hi,
sorry about my english. I build with lot of Help from Rolph my HK450 as Arduplane for FPV usage.
So i simply removed the original board, and replacet it with Matek F405 Board, CRSF Nano Receiver, TBS Nano VTX, Runcam 4K Cam.
All Information, lots of pictures you can find here: https://www.fpv-treff.de/forum/index.php?threads/vtoll-projekt-aus-wltoys-hk450-vtol-mit-arduplane.368/
I was absolute Ardu newbee, used lots of planes with Inav, and planes with MFD-AP, Feyutech FY31-AP and FY41-AP etc.
Because of CRSF protocol i decided against the wisch of Rolf and other friend to use stable, i usted nightly of 5.1.2021.
First Copter Flight verry nice:
at this flight the board alignmment was about 7° wrong, i forgot to recalibrate after mounting board.
But flight was verry nice for me. so first Ardu flight ever for me.
After fixing Board alignment Hovermode verry accurate.
This was first flight with transition to plane. The transition verry bad oszillating. I mean main reason verry wrong calculatetd airsped.
But after trimming Controller the plane flight was verry good. Because of short snow touch video failed, and sight verry bad, so it was only short flight.
After this flight it is not possible for me to get stable plane flight for longer time.
next flight with crash
last flight with crash.
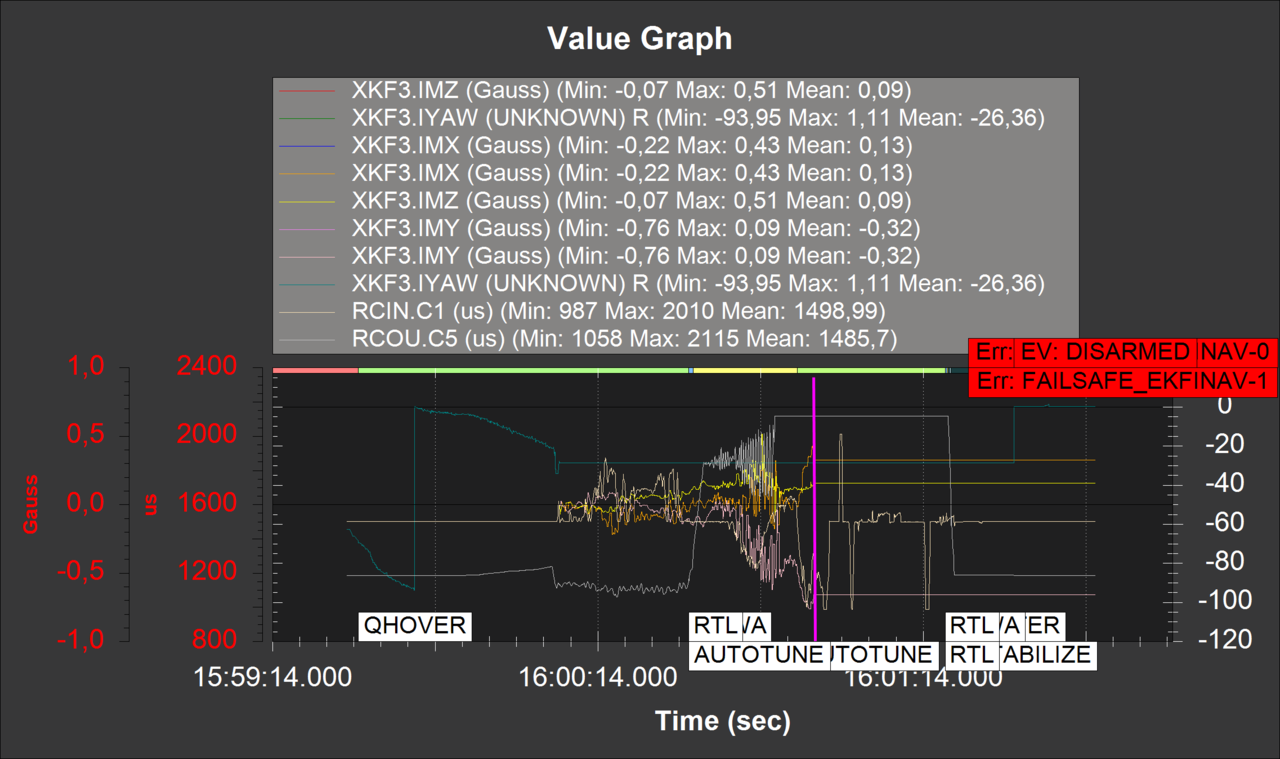
For me it looked like left motor turn off becaus of rotation. But at log it looks like EKF3 Filter switched off:
I can not attach the log here, it is to large.
For next step i will make test for engines at tabele with all akku usage and full throttle, if there no failure i will go bach to stable 4.07 and SBUS instead of CRSF to test.
Sepp