I’m in the final stages of building an octocopter around Pixhawk 2.1 and am just trying to sort out how to wire power.
The craft is a Tarot X8 running the standard 40a esc/4114 320 motor/1555 props that Tarot recommends, along with a pair of 6S 8000mAh batteries carrying a Sony a6500 camera and gimbal. All up weight will be around 7kg and e-calc expects hover current around 40a with a maximum around 120a.
Having had both motors and batteries fail in the air in the past, I’d like as much redundancy as possible. Dual power supplies sound great on paper, but how do I hook it up to be as fail safe as possible.
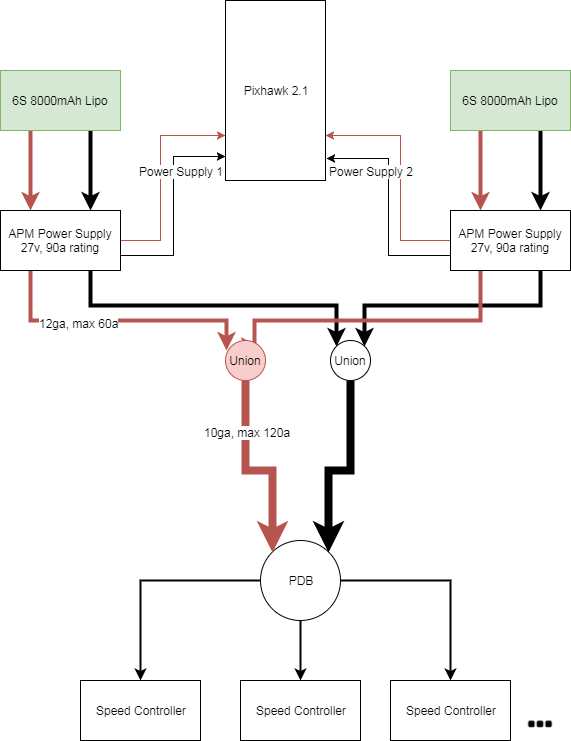
My current thought is to have each battery independent to the last moment. Each battery would have its own APM power module connected (Hobbyking 10s/90a modules), then just before connecting to the power distribution hub the lines would be merged in parallel.
In normal operation, the displayed amperage in the ground control station would be half of what the craft is actually consuming, and I could check logs after the fact to see if one battery is carrying more of the load than the other.
In a failure mode, if a battery loses a cell/explodes/falls off the other battery would be able to take over powering both the motors AND the flight control. I’d notice current on the remaining channel double, a bunch of alarms would go off and I would land before anything else terrible happens.
I’ve attached a diagram showing what I think this would look like:
Take a look at the normal Pixhawk method of powering the output bus with a zener to clamp the voltage. The problem with batteries in parallel is always voltage drops to to protection or one battery taking out the other. With the PIxhawk “official” method the batteries are separate always. One can’t take out the other but of course the problem with full redundancy is you don’t get to use the backup battery, until the primary goes away. Mauch as dual battery systems that are probably as good as it gets.
Like Mike mentioned, if one battery fails, it may well pull the other down with it. Unless you build a 100% split system like we do, there is always going to be a single point of fail.
The secondary power back up for the Pixhawk is to safeguard against the main power regulator failing, which does happen.
We use the Mauch and they are very reliable.
The best option is to have one master Mauch and the secondary Mauch (or HK) but just have a small LiFe battery pack as the backup. You only need a little one as it is only powering the Pixhawk and receiver.
The diagram you have is not really two batteries independent. it is technically one 16,000 mah ‘PACK’ in the 6s2p config.
BEST option as this is an x8 power top motors from pack 1 and bottom motors from pack 2.
BUT the pack for the top motors will deplete quicker then the bottom and this IS THE ONE YOU NEED TO MONITOR.
then having one power module from each battery will work as redundancy.
Please also check the ESCs do NOT have BEC, if youe do or you are not sure, cut the reg middle wire.
Thanks for the replies, good to hear that the plan is workable. I’ll look into the Mauch modules, having to split current to avoid overloading the power modules isn’t ideal.
The frame I’m using is the misleadingly named Tarot X8 (which actually has 8 arms) http://www.helipal.com/tarot-x8-octocopter-frame-set.html. It’s got a nifty central power hub and coaxial power cables in each arm to keep EMI down, but unfortunately running motors off separate batteries isn’t possible. No BEC on the speed controllers, the only power source going into the Pixhawk 2 will be the 2 power supplies, with a standalone BEC elsewhere on the frame to run the gimbal and LEDs.
A shorted out battery will bring it down for sure. Hopefully if a solder joint lets go or a single cell goes flat it’ll survive. Will post pics of the final setup once the rest of my parts arrive.
The biggest thing I was looking for was to make sure I wasn’t doing anything stupid with the setup that was going to make power flow backwards or open a black hole or something. If it looks sane to you guys I’m gonna build it.