I glued my quad booms in place with Foam-Tac and they seemed strong after only 4 hours of drying so I finished my wire connections as well. For my initial testing, I just taped the wires down with 3M Blenderm surgical tape. The finger holes for launching are no longer needed so it will be a good place to fill with excess wire. I ran the motor test in Mission Planner with success and bypassed the arm checking to test QSTABILIZE on the carpet for transmitter stick direction.
My Wing Z-84 is ready to test hover but the weather in upstate NY is raining and windy. Good weather to watch football on TV! It looks to be dry mid-week but today is Daylight Savings Time so it is now dark when I get home from work. Maybe I can test hover in my backyard with the porch light on!
My initial hover testing went very well after changing the 5x3 props to 3-blade versions since I didn’t have any 6" props. I’m not sure what the Kv the quad motors are because they are not labeled and are several years old. The 3-blade Ideal Flying Fish props have a unique look and sounded great! I’ll check the logs but I think I was around half throttle in QSTABILIZE mode.
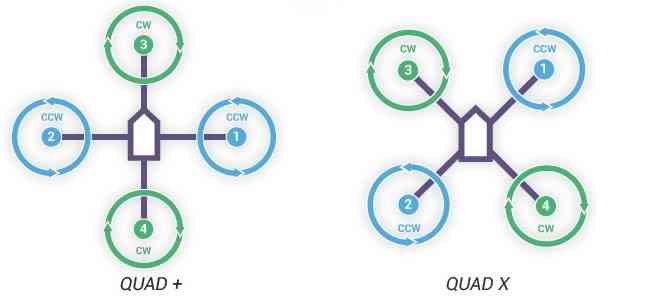
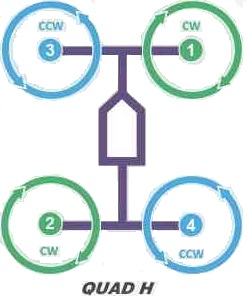
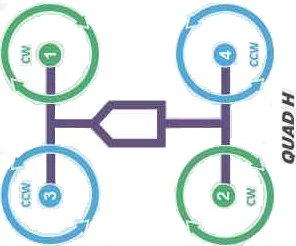
Isn’t an H-frame the wrong type, for struts running lengthwise? A right yaw for example would lift the front left and rear right motor, creating a thust vector against the desired turn.
It’s the same in either orientation as long as the motor rotations are correct for the forward direction. As you can see in the hover photos, the yaw works great!
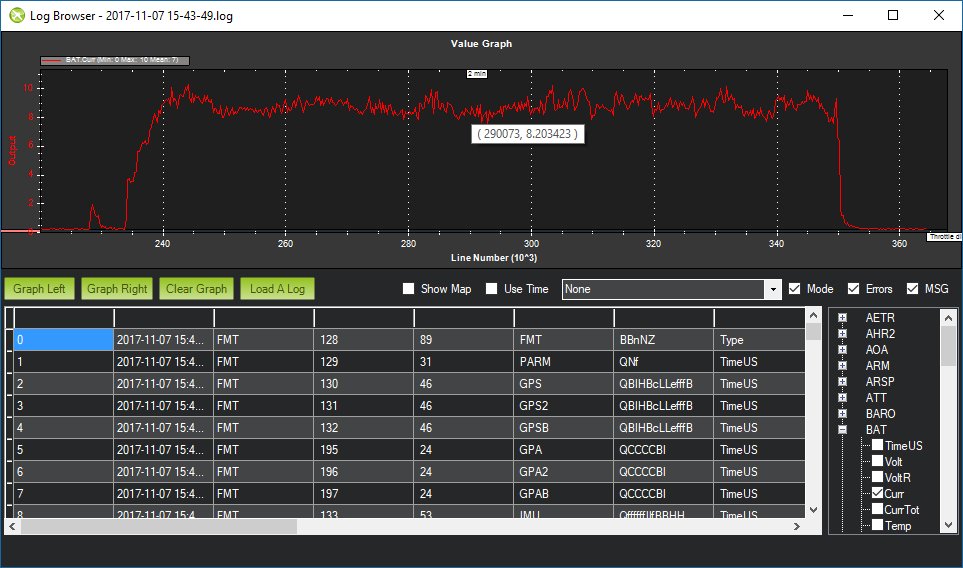
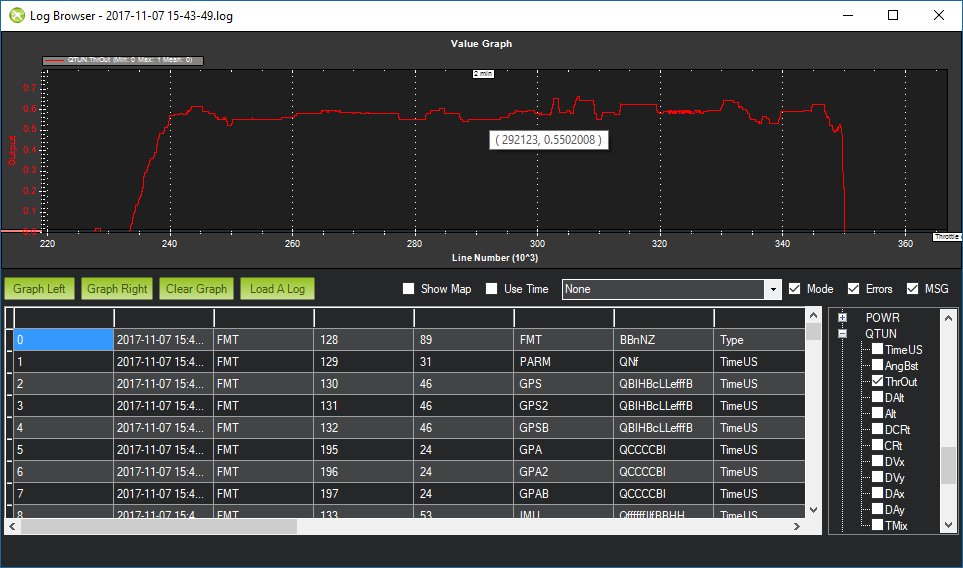
Here is my current .param file. I’ll add it to the first post as well. My hover current looked to be around 8 amps at 55% throttle so I’ll stick with this setup for further testing.
The Wing Z-84 is RTF as a Quadplane at 21.6oz (612g) using the 4oz (113g) 3s 30C 1300mAh pack.
Winter has arrived in upstate NY with some snow and cold temperatures so my test flying will be put on hold. We are currently preparing for the Thanksgiving Holiday which means my planes and projects have been moved to a storage room. It’s both a happy and sad holiday for me.
Unfortunately, the 12-amp HUG ESCs that I used from my old 230mm quad say, “2 and 3S Capable (no 4S please)” in the specifications.
Since the hover current is only around 8 amps, maybe a 3s Li-ion battery or Multistar pack would provide increased flight time. My 30C 1300mAh pack was simply chosen for size and weight. It was a good starting point.
Anxious to start test flying after winter, I did some quick hover testing of my Wing Wing Z-84 QuadPlane in my backyard which has been snow-free now for 3 days. It was 45 degrees with a 9mph wind.
The initial hovering isn’t bad and I had good control on the sticks. The side-to-side or roll axis may need some PID tuning as the length of the wing and the shorter distance between the booms created some rocking at times. However, even with the difficult roll corrections, it never lost control. I need to test and tune in a larger park area next.
I changed Q_A_RAT_RLL_P from 0.2 to 0.3 and the wing seemed much better at controlling side-to-side roll perturbations. I’m really liking QGC on my Android tablet as it allows for easy changes during the testing phase. It even supports QuadPlanes. The image below shows me using it with the larger FX-79 wing.
Although it was a bit too windy to fly, I decided to perform a hover test at the park in 10-15mph wind. In QStabilize mode, the wing did a pretty good job holding position facing into the wind. I’ll wait for a calmer day to test transitions to FBWA and CRUISE modes.
My initial attempt to transition to forward flight showed that I needed more thrust to counter the added drag from the quad booms. When it stalled and started dropping, I could save it by switching back to QSTABILIZE from FWBA mode. I never posted the video.
My initial quick fix was to change the 2-blade 5x3 prop on the forward flight motor to a 3-blade 5x3 prop. The power system should handle this increase without issue. I await testing on a calm day…
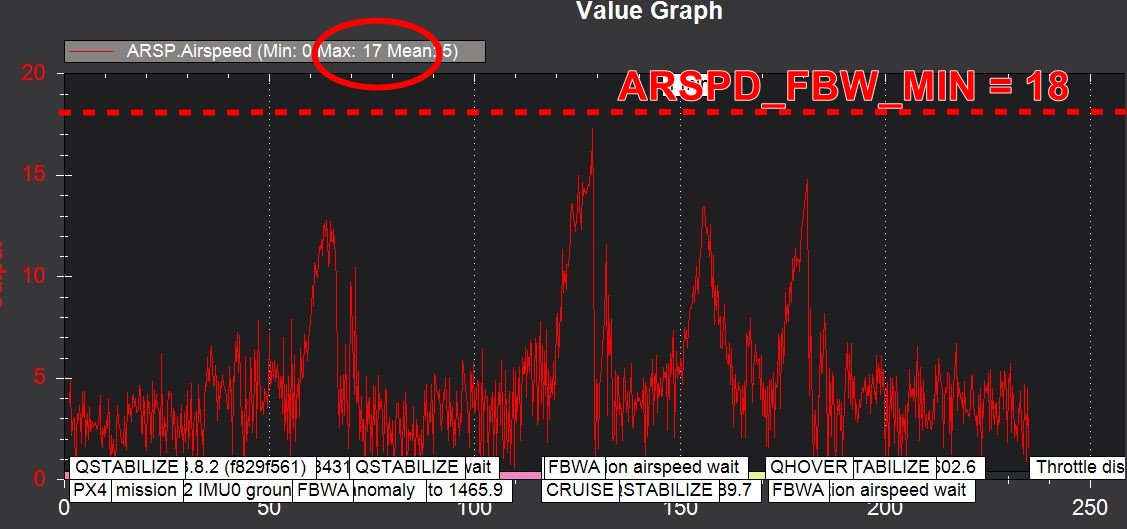
The 2nd forward flight test of my Wing Wing Z-84 QuadPlane had the same issue after changing from a 2-blade 5x3 prop to a 3-blade 5x3 prop. The plane starts moving forward in FBWA mode but then twirls around on itself. I’m not sure if the plane is stalling or a parameter needs to be changed until I look at the log file. I have been too busy to look at the logs yet so any help is appreciated.
Zipped Log is here. (5.2mb)
Bin file is here. (10mb)
Param file is here. (17kb)
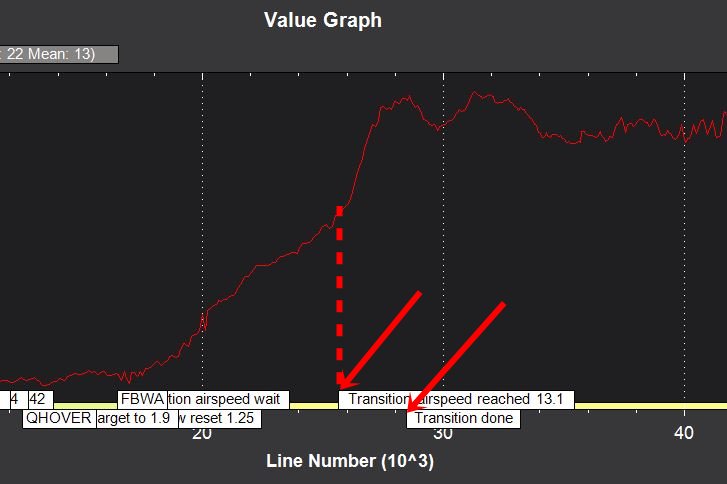
I think that is normal operation. When Q_ASSIST_SPEED is 0, it keeps the quad props spinning until the end of the initial transition from QSTABILIZE to FBWA. It doesn’t help after that.
It might be that my ESCs are not calibrated, making one stay on longer which turns it around. On Flight 1, a different non-posted video, I was able to fly around to the left in a half-circle using full left aileron. It then flipped around as I let go of the stick. Kind of weird…
Thanks for looking! I still haven’t had time yet, maybe this weekend…









 maybe can get more flight time.
maybe can get more flight time.