I am trying to troubleshoot wing fluttering phenomena during hand launching a flying wing.
Please watch this short video and suggest a solution.
Your gains are too high.
Foe anyone to zero in on your problem you need to provide the .bin log file from the flight controller.
It sounds windy, it could if is flying round fine after a while it could just be that it needed some time to workout the wind speed so it can calculate airspeed correctly. Or as Mike says your gains could just be too high, a log will tell us.
I guess DropBox only allows link to be send via email only, so I have uploaded the file in GoogleDoc, below is the link.
What is the best way to share large files on this forum?
https://drive.google.com/file/d/1oMabsnZbfiiWu5UZstsCVeS4KnTa2GLq/view?usp=sharing
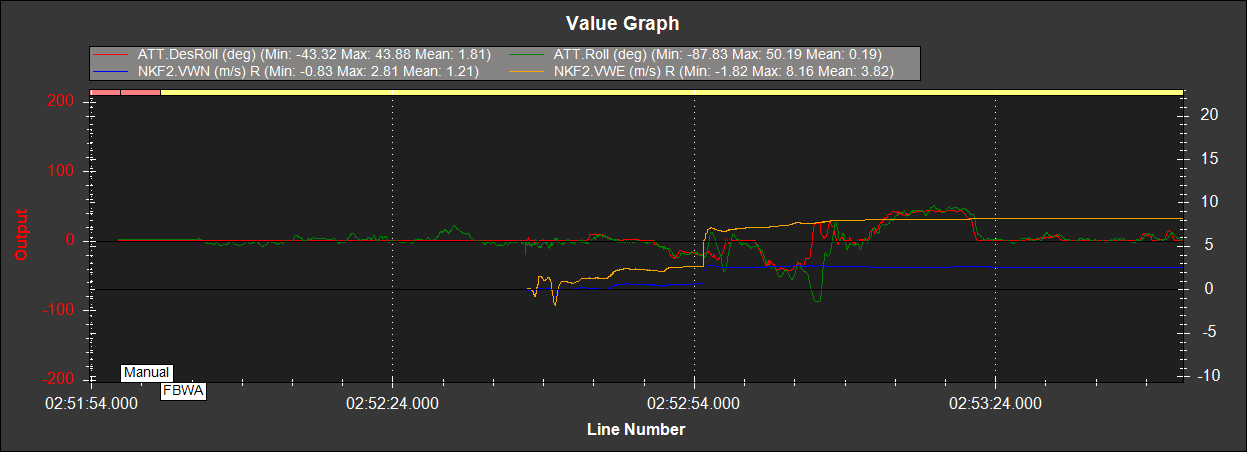
This is roll desired and actual along with the estimated wind speed. You can see as soon as the estimated wind speed builds the oscillation stops. The vehicle thought it was going slowly so it output greater control surface inputs. Once it had worked out how fast it was actually going it came good.
You have two options, fit a airspeed sensor so it will have a better idea how fast its going or de-tune the roll gains so it dons’t oscillate even with the incorrect airspeed estimate.
@iampete @RizHass please don’t get me wrong, don’t want to nag, but imho the oscillations are on pitch for the most part. please correct me if i’m wrong:
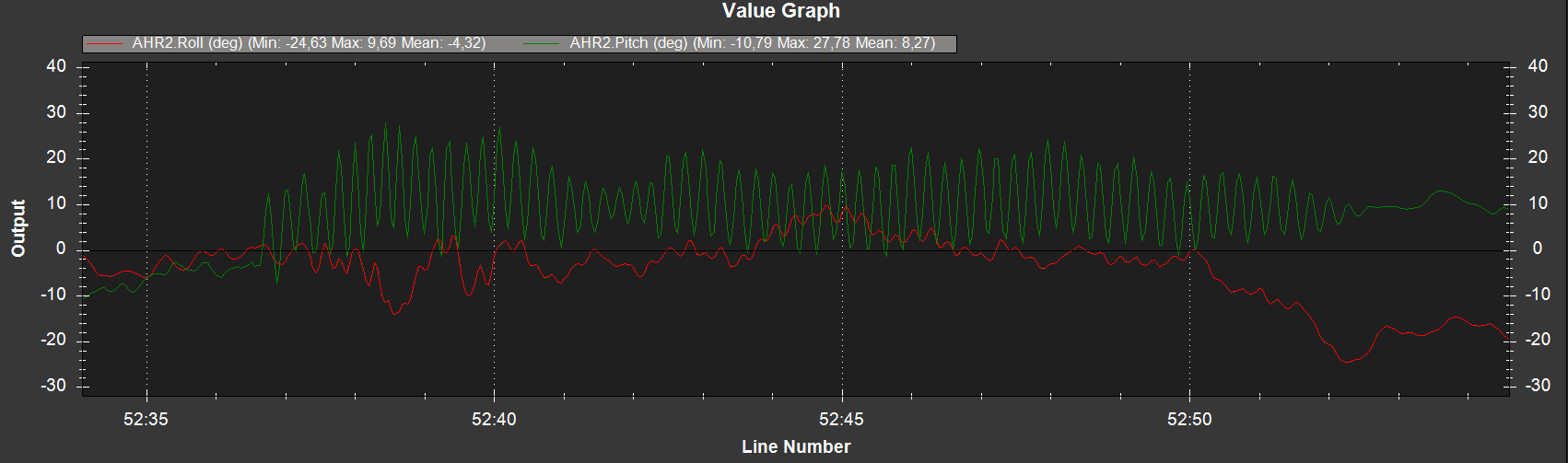
plus your pitchP is raised to 1.5 while your rollP is at the plane default of 1.
I agree, both “P” values for roll and pitch are too much, and interestingly did not changed during Autotune flight. Only I & D had some changes during Autotune procedure.
In order to reduce my gains, I will lower both Roll and Pitch “P” values to 0.8 and 0.5 respectively. These are typical values for X8 wing. My wing is Grim Reaper XL, comparatively close enough to Sky Walker X8:
https://ardupilot.org/plane/docs/configuration-files-for-common-airframes.html
I will leave “NAVL1_Period =17” for now, and perform autotune again.
Does this approach reasonable or there are any other gain knobs I should tweek?
1 Like
was there any issue with the pitch controller that made you raise the pitch P to 1.5?
No. these are the default values which are too high.
pitch P defaults to 1 actually, that’s why i was asking.
Does my approach as stated above seems reasonable? Its my first time playing with PID.
One more question related to Log file, the graph @iampete and you plotted, which option did you use from the drop down option? I am also trying to understand these log files, too many abbreviations.
Thanks
Had same oscillation problem (windy days) with my small AR wing, after many autotune sessions, manually reduced (halved) P and D, that’s solved the flutter.
2 Likes
My approach to reduce “P” value worked.
I conducted two flights today starting with Roll P= 0.8 and Pitch P = 0.5.
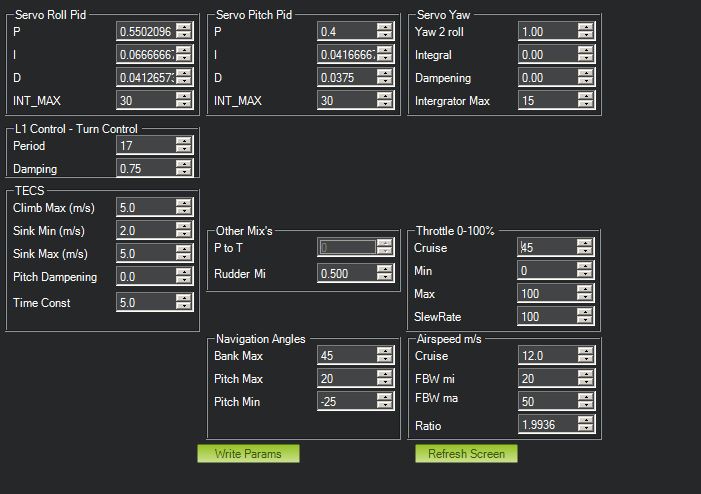
After Autotune Roll P changed to 0.5502, but the pitch remained unchanged. There was minor fluttering so on my 2nd flight I changed Pitch P to 0.4 and it completed solved the problem.
Here are the final PID values:
For anyone trying to understand PID, I highly recommend this video on ArduPilot website (Scroll down and watch 1st video):
https://ardupilot.org/copter/docs/tuning.html
Although PID stands for Proportional-Integral-Derivative, one way to explain this control loop to a non-engineer is as follows:
(-P) is the input applied by the FC also known as gain. It can be a ratio or some scaling factor to achieve desired result.
(I) is a Fit to a desired parameter (accuracy). For example, if you want to achieve 100ft what would be your tolerance. I am trying not to invoke Calculus here, but if someone can better explain, more power to them.
(D) is the rate of change relative to a know attribute. Also known as dampening. E.g. if you are filling up a glass of water, you start to pour water at faster rate at first but slows down as you reach the top.
Hope this will help someone having same issues.
1 Like
@RizHass good you got it flying well. a pitch P of 0.4 sounds pretty far off default though, and as for my experience the plane defaults are well on the conservative side to suit a wide range of airframes. maybe you want to post a picture of your elevon linkage geometry?
Here is the video and some basic description of my design.
now this is just rough guessing, but it looks like your geometry might allow for pretty generous throw at limited resolution:

how do your max throws feel when flying in manual?
equally long levers at the servo and the control surface control horn will likely get you at least ±45° control surface movement, depending on your effective servo travel. chances are this is the reason you need to relevantly turn down the Ps. extending the elevon’s control horns might be an option.
plus you’ll have some amount of built-in mechanical differentiation unless your linkage rod inserts the control / servo horn perpendicularly to the respective pivot point. this can be unfortunate on an elevon setup if your pitch down throw is relevantly larger than that of pitch up.
this is how i got my wings’ linkages set up:


they’re doing pretty well on default PIDs like that.
@vierfuffzig, I agree . My setup is extreme, not to mention size of my elevons are twice as much as your wing elevons. I can move one notch up on my control horn.
I have not flown in manual mode, fearing that its tail heavy. When I cut power it drops like a brick (Notice landing in the video). I am thinking to add 2nd gimbal axis (Camera Pitch stabilization) that should make it bit nose heavy.
Do you know which parameter, I can change to allow more roll control? Ardupilot documentation refers to “bank angle” is that how much roll is allowed?
LIM_ROLL_CD: Maximum Bank Angle
Maximum bank angle commanded in modes with stabilized limits. Increase this value for sharper turns, but decrease to prevent accelerated stalls.