I did my first hover test with a mini-talon quadplane today. It “almost” worked. The plane lifted off, but had wild oscillations in motor speed and jerked around madly. With some luck, I managed to return to the ground gently enough to avoid damage, so I will call the flight a success.
Despite my optimistic portrayal of the results, something is very wrong. My first thought is that one of the motors is damaged. However, the RC out values for the motors (on channels 5 thru 8) show a strange pattern that seems to indicate this is a control issue. Full log is at https://drive.google.com/open?id=1YQ877feqNZcD1nBF4-S7Y7tFwlxy-vsH.
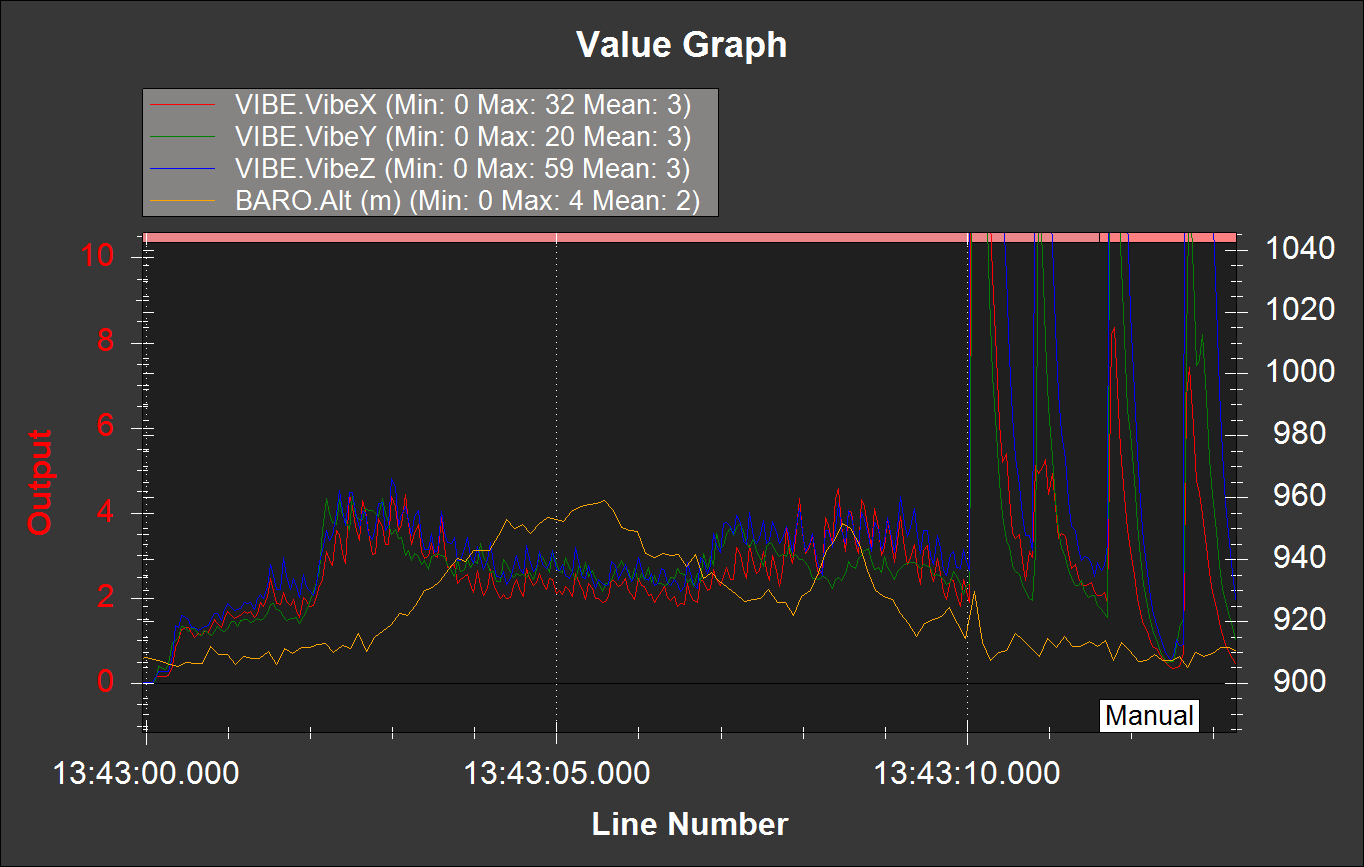
The logs have just over 4 minutes of time…but the useful data is a 3-4 second burst (about 10 seconds after the start of logging) when I spun up the motors but did not lift off and a second burst of about 15 seconds (that starts about 30 seconds after the first event).
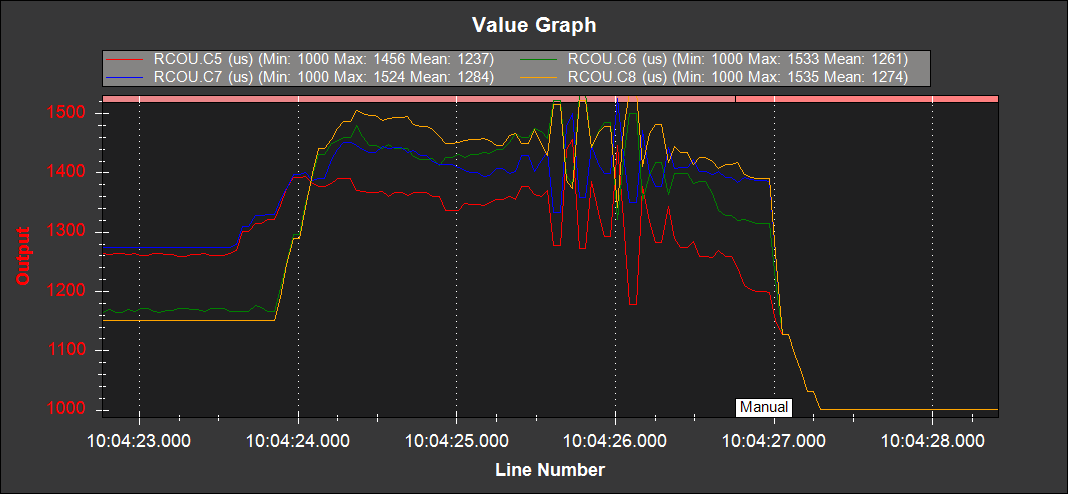
In both of the events that spun the motors, there’s a persistent behavior where two of the four channels go high, then low at ~ a 7Hz rate. The other two channels do the opposite. The average of these outputs are in the ballpark of the correct output amount, but the rapid oscillations can’t be correct. Here’s a couple of seconds that include the takeoff:

I am trying to fly w/o installing the wings. Plus, the front to rear difference for the motors is almost twice the distance of the side to side distance. So I imagine that the roll axis is much quicker to react than the pitch axis. I have not modified and of the stock PIDs (unless I did so inadvertently)
Any thoughts about what I need to look at?