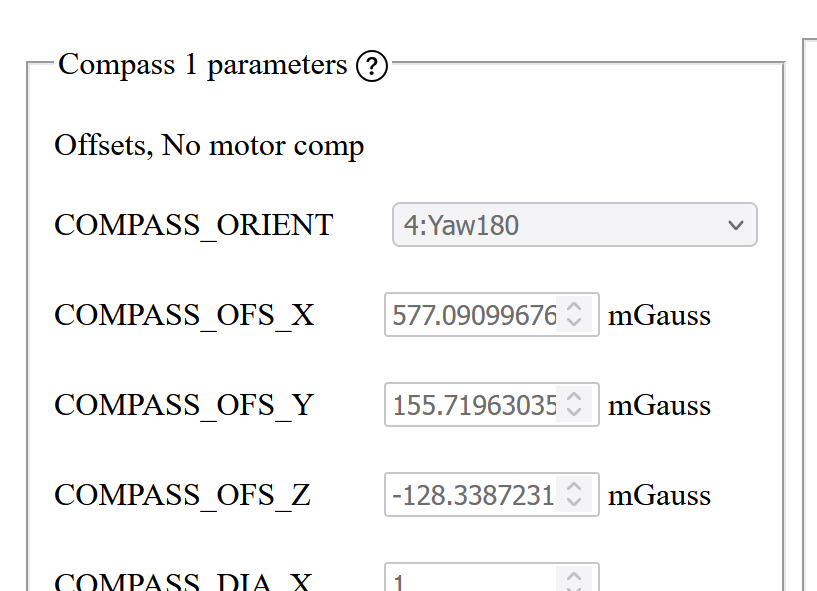
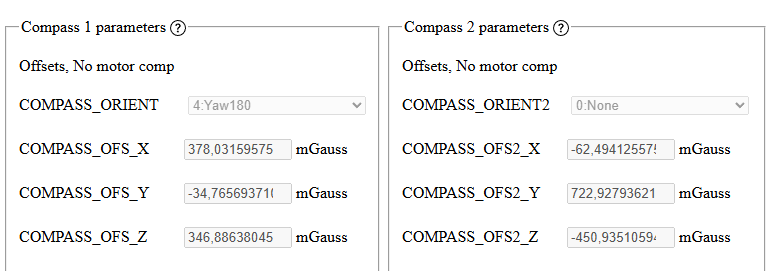
X offset is quite big what means you have a strong magnetic field around.
Try to rotate compass or even relocate it then MagFot it again. Or just buy next 2$ external module.
Is it the only one and external compass?
Just fly the copter and do circles, upload bin to web page, then come out the result, which used to be in range. But I have changing some hardwares and quite a long time from the first calibration.
Recently, those logs fly as the first time. The result from web tool is out of range.
@amilcarlucas Any specific steps or info about 6 different methods?
BTW, if I didn’t connect(power up) OpenIPC(Camera), the compass calibration result is still out of range.
Really confused, as there is no other difference in hardware.
If I got it correctly the MAGFit results are the offsets from your last calibration.
What influence magnetometer too are other field sources and direction.
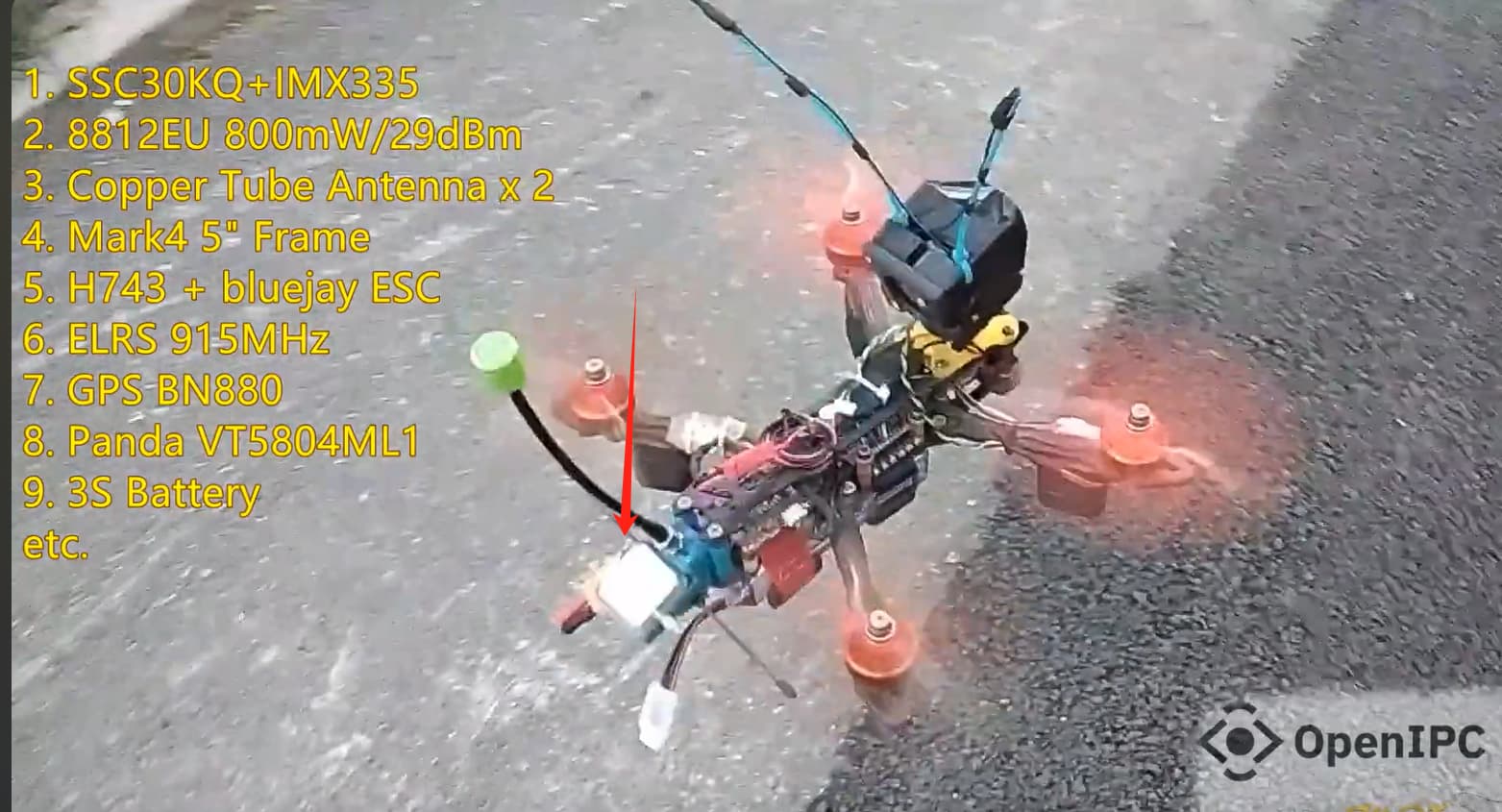
Your mag is close to the GPS, which is not ideal. It is better to keep them separated.
Could be your calibration went not so good, as well
And it seems direction is not ideal as well.
Correct any of 3 above, calibrate again, test flight then MAGFit.
I’m not an expert on compass in AP You may ask others here.
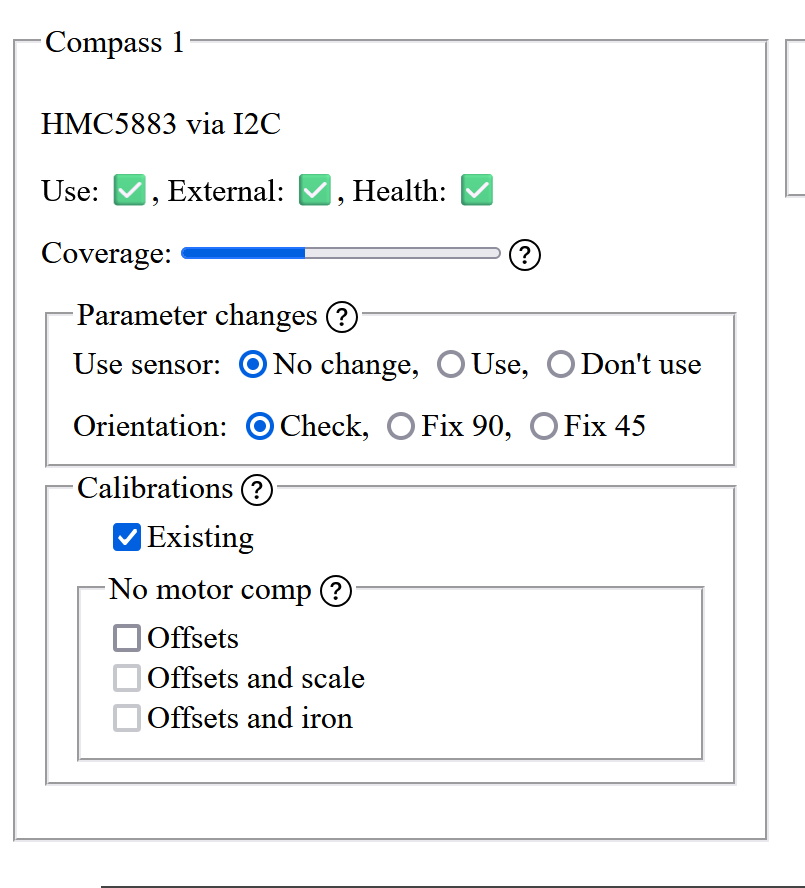
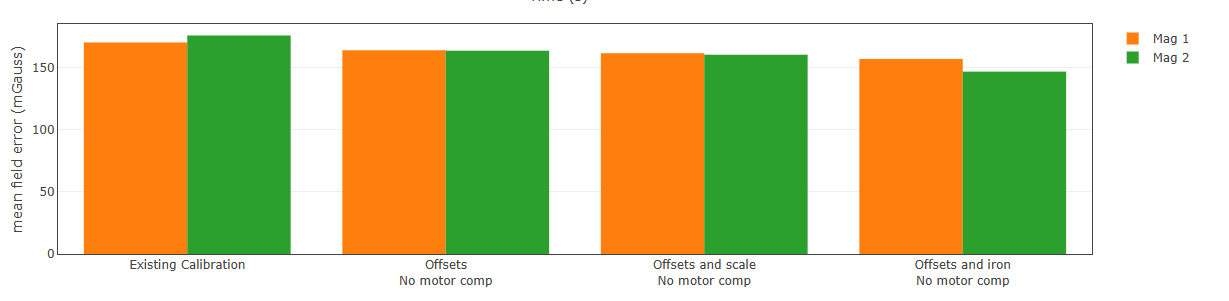
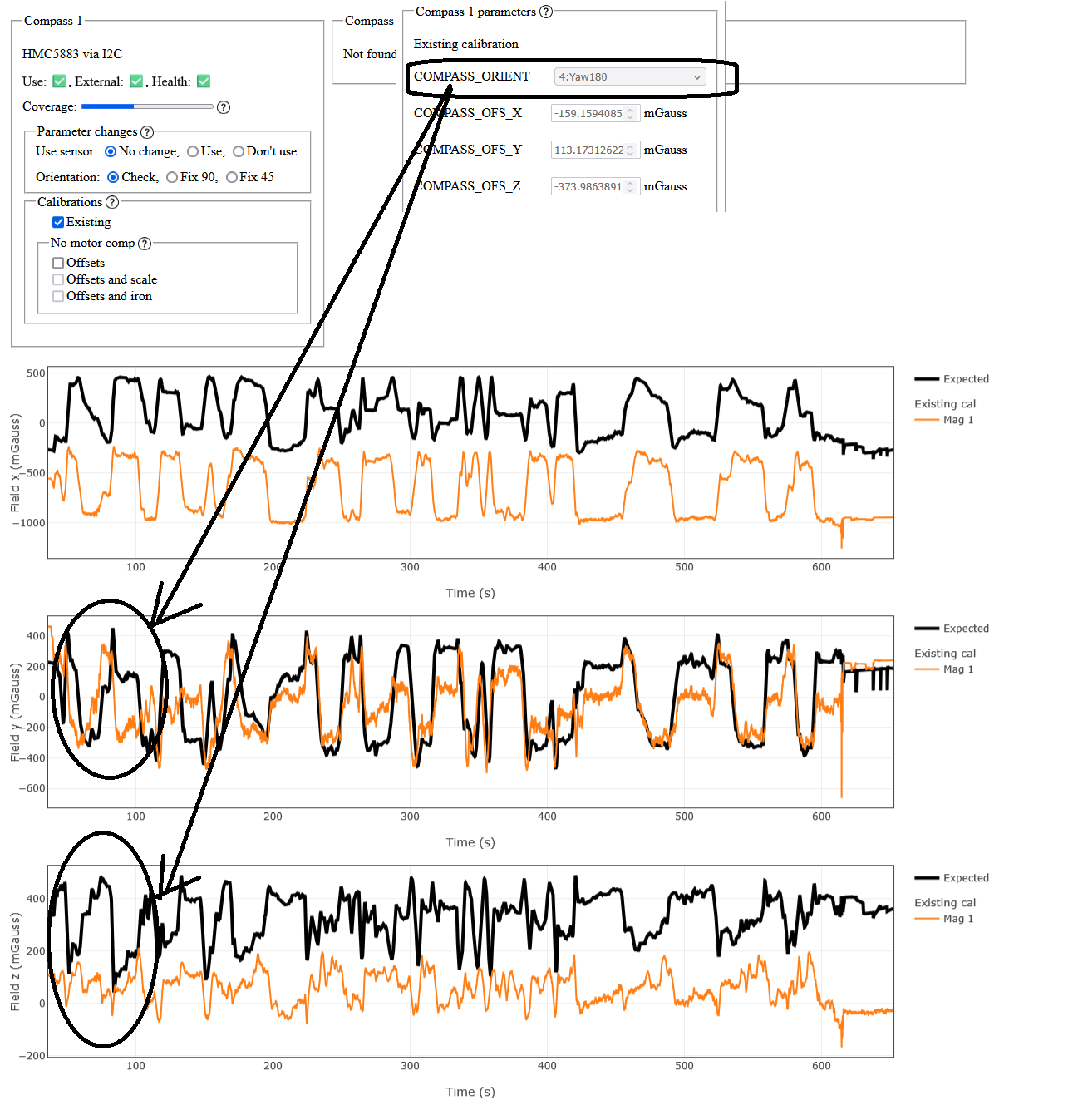
Hover the mouse over the ? and you’ll get some information. In really simple terms, look at the orange graph that is right above the parameters. Pick the option with the best (lowest) results.
On this quad I see there is no current monitoring because it isn’t giving you option for “Battery Current”, therefor the COMPASS_MOTx values. Too bad because I find that is often the best result for compass calibration.
Sure not. What is AMC?
I have disabled LUA scripts as I’m not going to use it, it crashed the board few times while enabled, and they are using about 500kB mem, btw.
File used here was from “dancing” with copter around.
@lida2003
I loaded MAGFit results using Mission Planner. Answering YES to the question if I’m sure. What can I say is direction shown with HUD is better by about 20 deg and shows true magnetic North.
So it works somehow even the numbers are out of scale.
Another question is whether it is a matter of MAGFit or if Declination Correction alone would suffice.
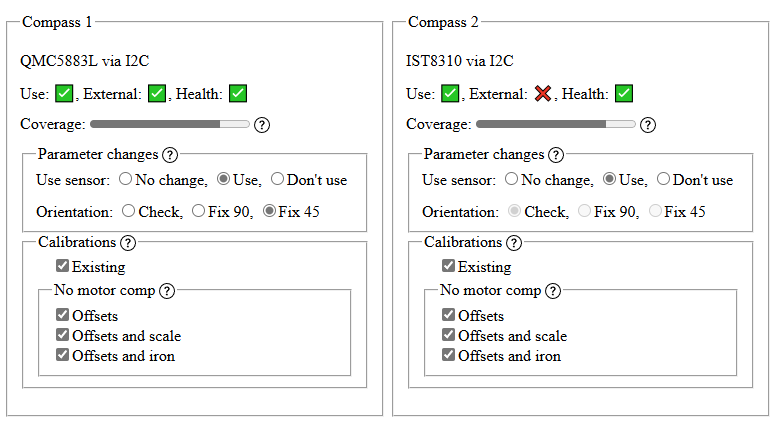
And here find a poor-man explanation for 3 types of corrections available:
Offsets: Tweaks the basic X, Y, Z offset numbers (COMPASS_OFS_X/Y/Z) to fix simple magnetic pull in your drone, assuming everything lines up nicely and scales evenly—like a quick fix for minor magnet mess from your frame or motors.
Offsets and Scale: Adjusts the X, Y, Z offsets and adds a single tweak (COMPASS_SCALE) to balance out how sensitive your compass is overall, still assuming the axes are straight, but handling uneven magnet strength across your drone.
Offsets and Iron: Goes all-out by fixing X, Y, Z offsets, plus fine-tuning diagonal (COMPASS_DIA_X/Y/Z) and cross-axis (COMPASS_ODI_X/Y/Z) adjustments to handle tricky magnetic wobbles from non-straight axes or weird metal parts in your drone, giving the best accuracy for complex setups.
One more, fly, dance or whatever with your drone to get “Coverage” marker as long as possible. It’s important that MAGFit has a significant amount of data.
It doesn’t matter at all. Last clicked will be used for file. I read it somewhere, but it was not clearly stated as usual. No, it was in the video to which I provided the link above.
MagFit’s Logic: MagFit analyzes your flight log to determine the best calibration based on the quality and coverage of the data. When you enable all three options, MagFit prioritizes the most detailed and accurate calibration it can compute, which is Offsets and Iron.
Coluld be it’s not worth to use all three as the difference is so small, so better to leave zeros in fields for faster calculations.
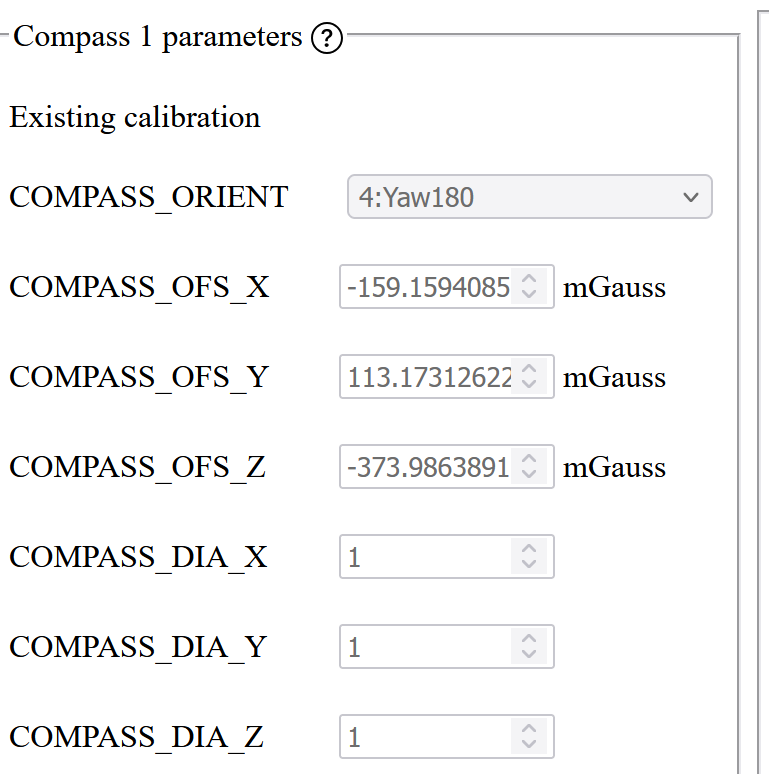
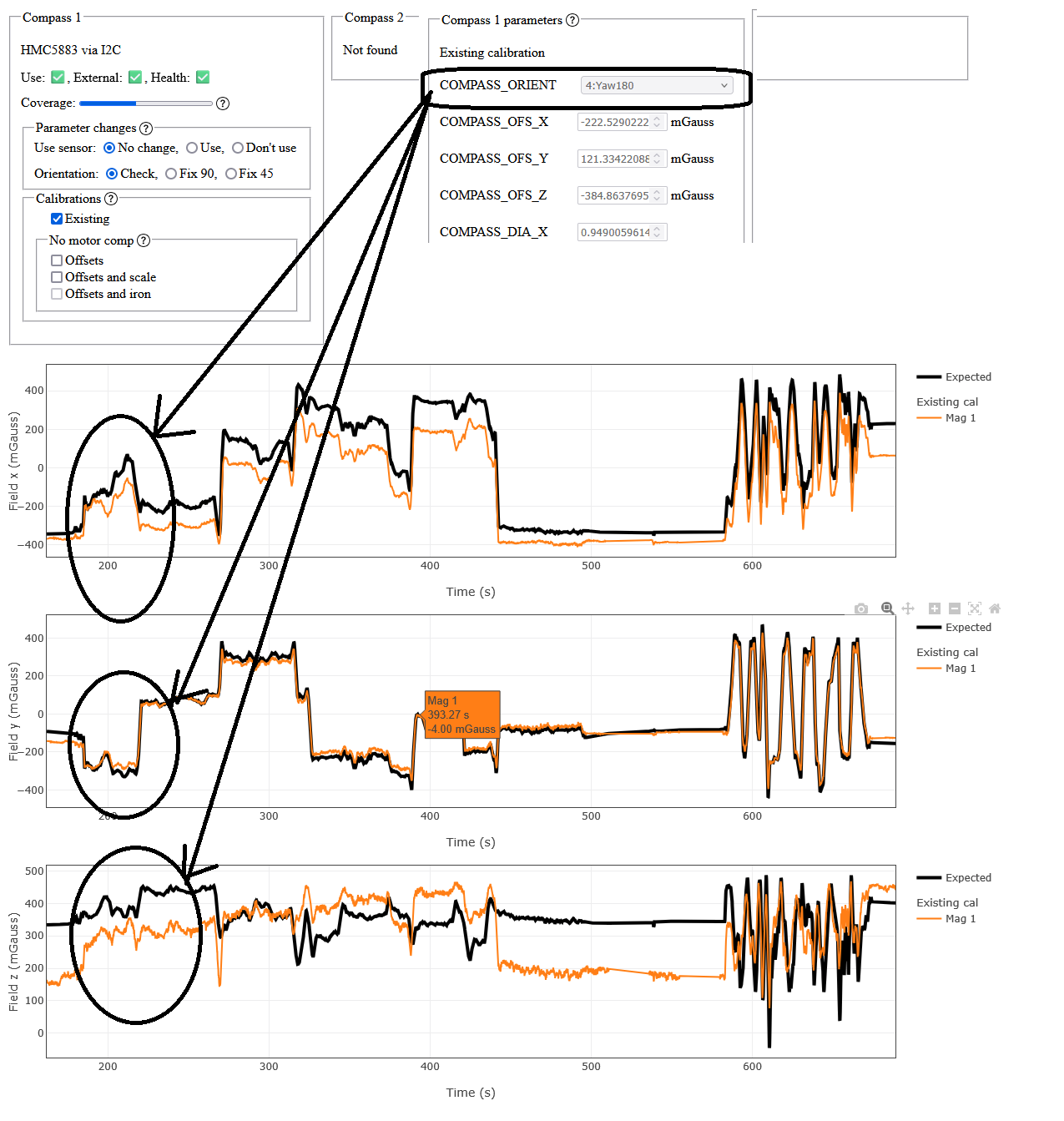
I will test it soon, but it’s definitely wrong of orientation(Apparently, I have forgot how to mount previously and use that configuration directly). Just see those x-y-z shape, which is wrong.
As I know orientation is not so important as it’s corrected while calibrating. Just keep at least 45 deg angels, 90 are better.
I spent some time verifying my orientations and discovered that it is unsolvable.
It’s shown as Y180 what is not a true. Same as your’s.