Hey Shawn, I removed the case on the Pixhawk Clone. The case includes a foam piece that fits over the baro. But, I do see two locations on the board for 2 chips that are not installed. I would like to find out what these missing chips are. I looked on the internet but did not find a parts list / parts placement for the Rev A, 1, Y (mine is Rev 1 processor). Do you know of any resources where I can obtain the parts list / placement info. for the Pixhawk. I would like to understand what parts are missing and their function.
There’s no effective way to add the missing parts, and you cant tell witch other poorly manufactured parts will fail next.
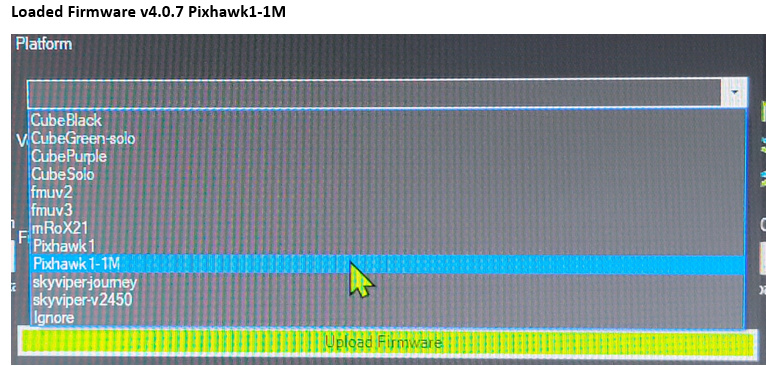
OK, that looks like a 2.4.6 , before they took off the “optional” parts. I’d probably just stick that on - it should just plug straight in. The 2.4.6 version was generally better quality than the 2.4.8 . The downside is you should start over with the configuration and tuning.
all mandatory calibrations
set up voltage and current monitoring, Fence, check radio failsafe
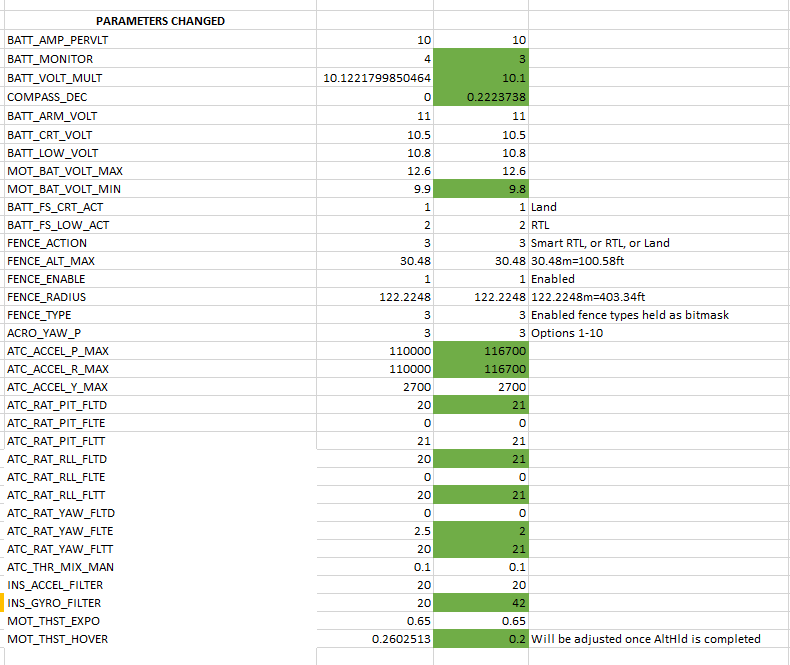
MissionPlanner Alt A (or spreadsheet) and set initial values
MissionPlanner motor tests
hover tests, start setting up Harmonic Notch filter right away
fine tune harmonic notch filter, move on to Autotune
get out there ->
HNOTCH phase 1 capture pre-filter gyro data
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
hover test, check FFT
HNOTCH phase 2 capture post-filter gyro data
INS_HNTCH_ENABLE,1
INS_HNTCH_MODE,1
INS_HNTCH_REF,{hover_thrust}
INS_HNTCH_FREQ,{peak freq from FFT}
INS_HNTCH_BW,{peak_freq / 2}
INS_HNTCH_ATT,40
INS_LOG_BAT_OPT,2
I thought you meant that was a photo of the spare/old flight controller you have.
If the baro really is going bad like we suspect, it probably won’t be worth replacing. Easier to use another flight controller.
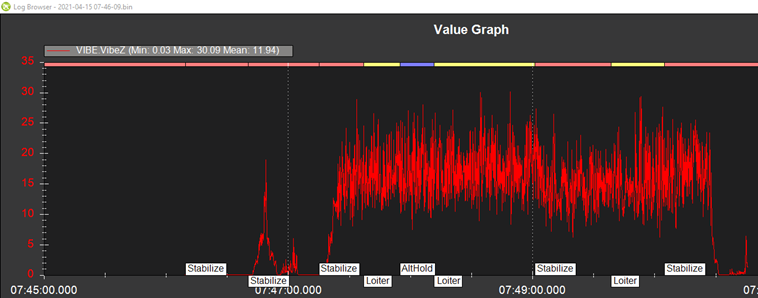
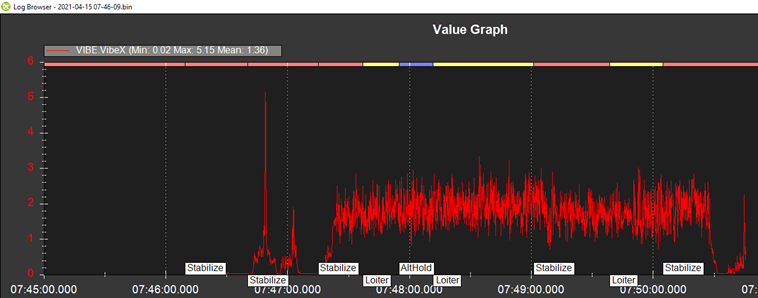
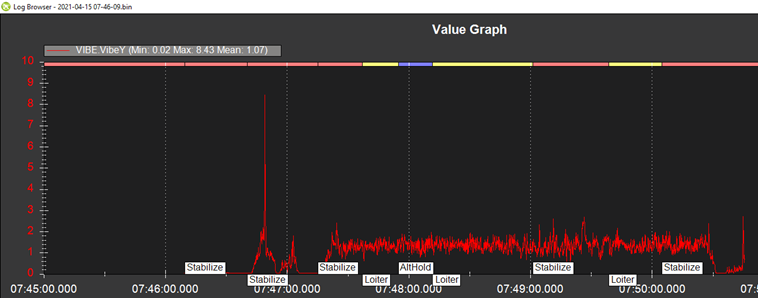
Hey Shawn checking in. Been working on reducing vib., dynamically measured Props/Motors as a system. Surprised to see that even though props. were balanced and motors dynamically balanced prior to the dynamic balancing, I still was able to reduce the props/motors vib. by changing the prop. position on the motor!?? Anyway, did get some improvement, Z mean pretty low (see images).
Even after reduction of the vib. I am seeing a “twitch” STAB/LOITER/AltHld. Could the “twitch” be the result of INS_GYRO_FILTER=42 rather than the default=20? Also, the responsiveness of the Quad seems more agressive than what I remember with the Pixhawk Clone??
.bin: https://drive.google.com/drive/u/0/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
Holding off on MOT_THST_HOVER, Notch Filter, AutoTune until I resolve the “twitch”.
Good work on those vibrations.
The gyro filter should be fine how it is. Control actually looks pretty good.
I’m struggling to see a twitch in the log, and all axis appears to be following the RC input within the best of it’s ability. I’m wondering if there’s a problem with an ESC???
Change ATC_INPUT_TC,0.15 to about 0.20 or 0.22 for a softer RC Feel, less aggressive. That doesn’t change the actual tuning relationship between FC/motors/ESCs.
ATC_RAT_RLL_D and ATC_RAT_PIT_D could probably come up a bit to 0.00675 and see if that takes some of the “unsteadiness” out of it. If motors get hot then put it back down. If motors stay cool or normal it might even be able to go higher if flight improves, like 0.008
You can definitely and safely set these now:
PSC_ACCZ_I,0.7
PSC_ACCZ_P,0.35
Next step (after the above changes and test flights) would probably be to try increasing these:
ATC_ANG_PIT_P,4.5
ATC_ANG_RLL_P,4.5
in steps to about 5 , 5.5 , 6 to see how control improves. It will reach a point where control gets worse (oscillations) and you go back a bit. I’m pretty sure you’d be OK with 6 for those.
Yes, but you don’t need to do anything with MOT_THST_HOVER , it will look after itself. Since autotune didn’t work before, you might not need to use it if we can get the tune close enough manually.
It will definitely be worthwhile to do the harmonic notch filter though.
Yes, make the first lot of adjustments and see how that goes, then try increasing
those P values. Normally I’d say do the HNOTCH before anything else but this unit has been a bit problematic. I’m just suggesting what I would do to get solid reliable flight and we can check how that works out.
Hi again Greg,
Actually I’m interested in what you are calling a “twitch”.
Is it a rhythmic or constant oscillation, or maybe it happens in conjunction with, for example, an RC stick movement?
Or is it random, like periodically and not predictably, the quad dips an arm for a fraction of a second?
Hey Shawn, the twitch is when I am in Stab/Loiter or AltHld. It looks like a very momentary (small) change in Roll attitude (I think it is limited to Roll but I cannot say that for certain). The Twitch only lasts about 0.1 to 0.3 sec. and then the Quad corrects its attitude back to level flight. I do not have my hands on the sticks when the twitching is taking place and I use 2 different TXs (FrSky Taranis X9D and Master Radio TX16S Max). At first I thought this was possibly related to Vib. i.e. that was the motivation to dynamically balance Motors/Props. But as I said, even after dynamic balancing and reduction of Vib. I still see that “twitch” (although the twitch is less now than it was prior to the dynamic balance).
Are you thinking this is something else?
Should resume the flight testing again tomorrow morning.
EDIT: do you mean it’s related to changing flight modes? or just sort of random and nothing to do with any transmitter inputs at all…
Do you have the buzzer fitted?
If so try NTF_BUZZ_ENABLE,0 and see if it still happens.
With those good transmitters you can set up yaapu telemetry and get so much more that what the buzzer tells you anyway, and usually you cant even hear the buzzer during flight when you need it the most!
Shawn, it is not related to changing FltModes. It looks like a random noise propagating through the system, or like a gain is turned up a bit to high and the quad over reacts. Does seem a bit more prevalent when the wind is blowing (3 to 5 mph wind).
I do have a Buzzer installed, I will disable it and see. Come to think of it. When I replaced the Pixhawk Clone with the 3DR I moved the buzzer, pwr. module, and rerouted a few wires.
Yea these TXs are great for inclusion of yaapu Telem. Just peeling back the onion skin and yaapu is further down the list after I get the quad stable and capable of repeated Auto Flights.
Hey Shawn, I want to do this incrementally so I ultimately determine and understand what is the root cause of the twitching. Very short flight on the order of 1 min. PreArm is about 5 min so the meaningful data is near the end of the file around 17:13:39 Tlog. If you look at the RCIN graphs (Loiter 17:13:59 - 17:14:5 time period) you will see the RCIN is flat.
I only modified ATC_RAT_RLL_D and ATC_RAT_PIT from 0.03 to 0.0675 and Turned off the Buzzer Off (NTF_BUZZER_ENABLE=0). The motors are warmer, but not hot.
The twitching is still there. It looks like the twitching is still as significant (same magnitude i.e. same amount of degrees roll but spread over a longer time period). Again, I am not really seeing any Pitch twitch, or at least not visually as dominant as the Roll.
OK, yes we can see those oscillations in the log clearly.
Going back in the discussion, at one stage you had these (and higher ATC_ANG_RLL_P) and you said it resolved the roll problems.
I would set them again:
ATC_RAT_RLL_P,0.112
ATC_RAT_RLL_I,0.112
ATC_RAT_RLL_D,0.007
I cant tell what you had for pitch back then, but same will be OK :
ATC_RAT_PIT_P,0.112
ATC_RAT_PIT_I,0.112
ATC_RAT_PIT_D,0.007
EDIT: actually lower those D terms to 0.005, so you end up with these:
ATC_RAT_RLL_P,0.112
ATC_RAT_RLL_I,0.112
ATC_RAT_RLL_D,0.005
ATC_RAT_PIT_P,0.112
ATC_RAT_PIT_I,0.112
ATC_RAT_PIT_D,0.005
You also had a higher ATC_ANG_RLL_P of 6.5 but try those ones (above) first and see if flight is any better, and if so, see if you can sneak up the ATC_ANG_RLL_P and ATC_ANG_PIT_P in stages.
Hey Shawn, actually I believe you have the Pixhawk Clone confused with the Pixahwk 3DR. Those params are from the Pixhawk Clone. The Pixhawk 3DR was first flown on the 6th of April.
The params in the Pixhawk are from a freshly loaded FW, the only edits were per the table.
That said, so I will modify the current ATC_RAT: RLL/PIT to the values shown under your “Edit”.
Current Values for the Pixhawk 3DR are:
ATC_RAT_RLL_P,0.135
ATC_RAT_RLL_I,0.135
ATC_RAT_RLL_D,0.00675 per your previous comment
ATC_RAT_PIT_P,0.135
ATC_RAT_PIT_I,0.135
ATC_RAT_PIT_D,0.00675 per your previous comment
Yes I understood you changed the FC over, they are basically the same flight controller, and as far as I know you haven’t changed the motors, props or ESCs. Those suggested settings in the EDIT are not very different that what you have so they should be safe. Hopefully that will smooth out the ride.