Hey Shawn, conducted three flight test this morning (conditions a slight breeze 4-6mph, higher at altitude). I did not make the long list of param. changes you suggested yesterday afternoon, but instead I wanted to try something. I primarily change the INS_GYRO_FILTER from 42 back to 20 (2nd and 3rd flight test) and this reduced the twitch. The 3rd flight test I retained the INS_GYRO_FILTER=20 and changed the RLL/PIT PIDS back to the previous settings you recommended. The Twitch was reduced even more. I have uploaded all three flight tests (3 separate folders) .bin and Tlog files.
https://drive.google.com/drive/u/0/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
If you could look at the data and let me know what you think i.e. should I move forward with the large list of param changes? Then conduct the notch filter flight?
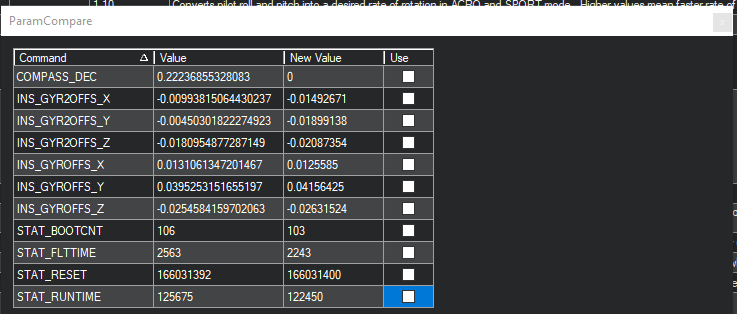
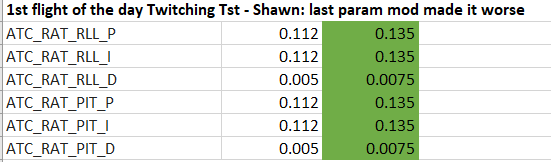
NOTE: the params highlighted in green are the values changed to prior to the flight, the values not highlighted are the params prior to the pre-flight changes.
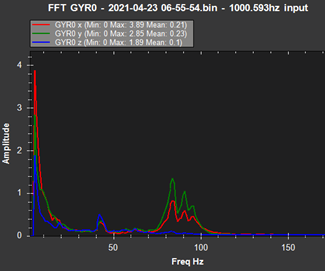
##Flight Test #1 ARM Arrpx. 06:55:41 – 06:56:22:
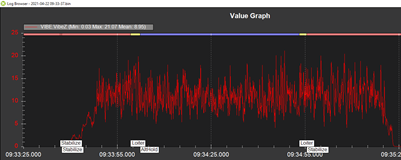
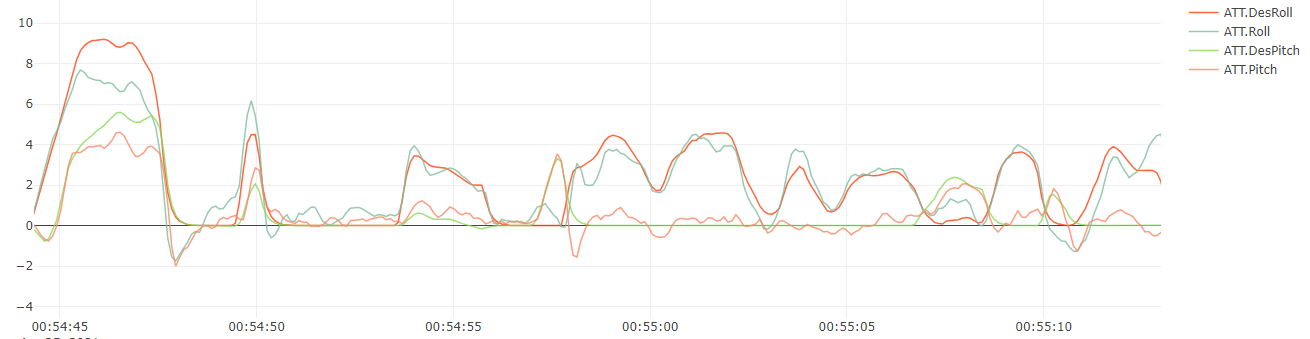
Stabilized mode only, Twitch very noticeable, HUD shows 2-4 degrees roll, primarily roll to the right.
Param. changes prior to this 1st Flight Test
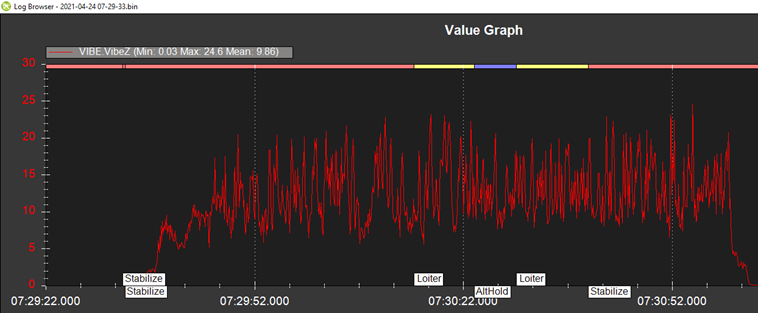
##Flight Test #2 ARM Arrpx. 07:05:42 – 07:07_07:
Stabilized mode for a few seconds, then Loiter, Twitch not as noticeable, HUD shows 1-2 degrees roll, primarily roll to the right. Twitch more noticeable in Stab. Mode.
Param. changes prior to this 2nd Flight Test

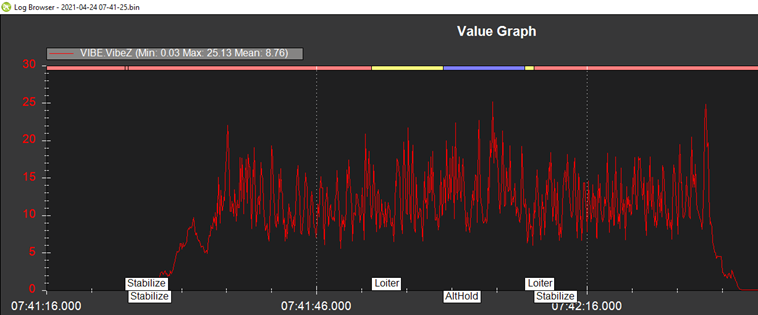
##Flight Test #3 ARM Arrpx. 07:21:57 – 07:24_48:
Stabilized mode for a few seconds, then Loiter, then Stab. and made a few aggressive Roll maneuvers.
Twitch reduced a bit more with these param. settings, HUD shows 1-2 degrees roll, primarily roll to the right. Twitch more noticeable in Stab. Mode.
Param. changes prior to this 3rd Flight Test