Any suggestions regarding Mot/ESC for a Quad (new frame that you suggested, about 450 size)?
I would probably go with the iFlight 2814 880Kv with 11’ props on 4S if it was a decent frame (not the F450 wet noodle) in the 450 range. This would be good to 2kg All-up-weight. There are any number of suitable ESC’s, You want a BLHeli_32 30a or higher.
I make a ton of this size birds using the 960 kv motors. This type of frame nomaly does not need any tuning. My suggestion is to delete the old config and calibrate everything from scratch then fly the craft a few times in stabilize. if you get a nice floating flight then switch to GPS and fly it more min 3 battery cycles. do not auto tune if you don’t need to. Your right in the spectrum that the software was designed to run. Also it does take some ability to Yaw the bird without moving the throttle so practice makes perfect as you gain experience.
Thanks for the info. Brandon. Are you flying with a 4S bat.?
Dave noted that my motors are maxing out during Yaw, which I can see in the RCOU. Surprised since these are 980KV motors, Turnigy inexpensive, but still I am surprised.
One thing I need to try is a smaller prop. (currently 10/4.5). Probably 9/5, this would allow for higher RPM on the motors and should get the RCOU more around 1900 to 2000 (I think). I need to run it through ecalc and see the diff. in performance. Removed the FPV cam/TX and some other stuff to reduce the weight by 2.2oz, not a lot but every little bit will help. I can see the RCOU C1-C4 toping out at around 1800.
I am not ready to pitch this quad into the trash as was suggested.
46 for sure the extra power can help a lot all around.
I use 9x4.5 tris as the base but 10x 4.5 if lifting cameras. 960 kv. “I need to run it through ecalc and see the diff.” No need to use that just swap and fly.

I will give it a shot. I was thinking the same thing about the parms. The Quad seemed to fly better before I started making all the param. changes.
Hey Brandon, what motors ae you using, and who do you purchase them from?
I use Gartt 960 kv they say S3 but work fine with S4 you can find them on Amazon.
Hi Shawn, I thought I would check in with you and provide you an update on things.
The quad is flying really really good! Very smooth, Stab. Is so stable that you would think it is in Loiter! Wow really amazing.
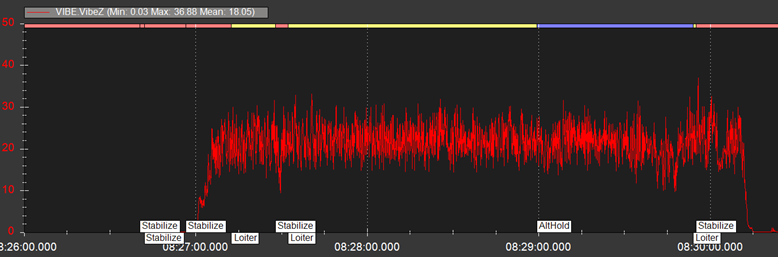
I have been trying to reduce the Z vibs. Initially tried modifying the Pixhawk mounting.
Was:
1st mounting plate secured to the frame with 4ea ¼ high nylon standoffs (bolted to the frame and mounting plate with sm. metal bolts). This mounting plate is then secured to a 2nd mounting plate via diagonally mount rubber shock absorbers. The Pixhawk is mounted to the 2nd mounting plate with double sided foam.
Changed To:
The 4 nylon standoffs were replaced with silicone rubber antivibration mounts (apprx. 3/8” tall).
After making these Pixhawk mounting setup changes I tested the Quad. It was horrible!! The vibration was significantly worse by a huge factor. The vibration was so bad that it even resulted in Clip0, Clip1, and Clip2 and the Z Vib max. was running up as high as 73.5.
I reverted back to the original Pixhawk mounting setup and dynamically balanced the motors. This made a significant difference in the Z Vib, and of course no Clip0 – Clip2 issue.
Here is a .bin and pick of the Pixhawk mounting if you are interested.
https://drive.google.com/drive/u/0/my-drive
Also, this morning I had an issue with downloading the logs. An error message: Log Browse will not function correctly without FMT messages in your log. These appear to be missing from your log. I read a few posts that suggested reformatting the SD card, which I did. This resolved the issue. Any idea on why / how this issue occured?
Hi Greg,
That onedrive link is not correct. I used one of your old links.
Nice propwash shield! Unfortunately there wasn’t much yaw in that log to see how it affects altitude, but otherwise OK.
Good job working on those vibrations - it’s never a one-size-fits-all when it comes to vibrations. X and Y axis vibrations are great. Z is tolerable and should be OK.
Now get out and start doing some more dynamic flights!  Be careful with all that Simple and Super-Simple switching… Best to just practice in Stabilize, AltHold and Loiter and get used to the orientation, rather than relying on Simple mode.
Be careful with all that Simple and Super-Simple switching… Best to just practice in Stabilize, AltHold and Loiter and get used to the orientation, rather than relying on Simple mode.
Hey Shawn, what is your concern regarding SprSimple and Simple?? I primarily use SS and Smpl when the quad is far enough away that visual orientation becomes an issue (No FPV function as yet).
any advice regarding vib dampening materials?
Here is the correct url: https://drive.google.com/drive/u/0/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
that’s exactly what you want as your base setup!
It is really nice to fly!
I understand what you mean about the orientation at distance. You can roll right/left or pitch foward/back to see which way the quad goes to get the orientation, then operate it without Simple mode (when all the critics are watching), you’ll look like an expert then.
Once you become better with the sticks and orientation, Simple mode will just be if you want to hand to RC transmitter to a first time user - Loiter Simple would probably be the mode of choice for that.
Hey Shawn, well more issues, I am beginning to sound like a broken record.
Well over the last 3 days I have flown about 26 Auto flights (6 to 15 waypoints). All was going well until the flight around 5:30PM. The FltPln consisted of 15 waypoints, as the Quad reached the 7th Waypoint it began losing altitude (significantly losing Alt., to the point that I thought it was going to have a hard landing! I switched out of Auto into Loiter and gained control and brought it back (Loiter SS). As I switched to Stab. when the Quad was close in it was VERY difficult to control (I don’t think I was overreacting and overcontrolling) but the Quad was nearly impossible to control, hard landing and flipped.
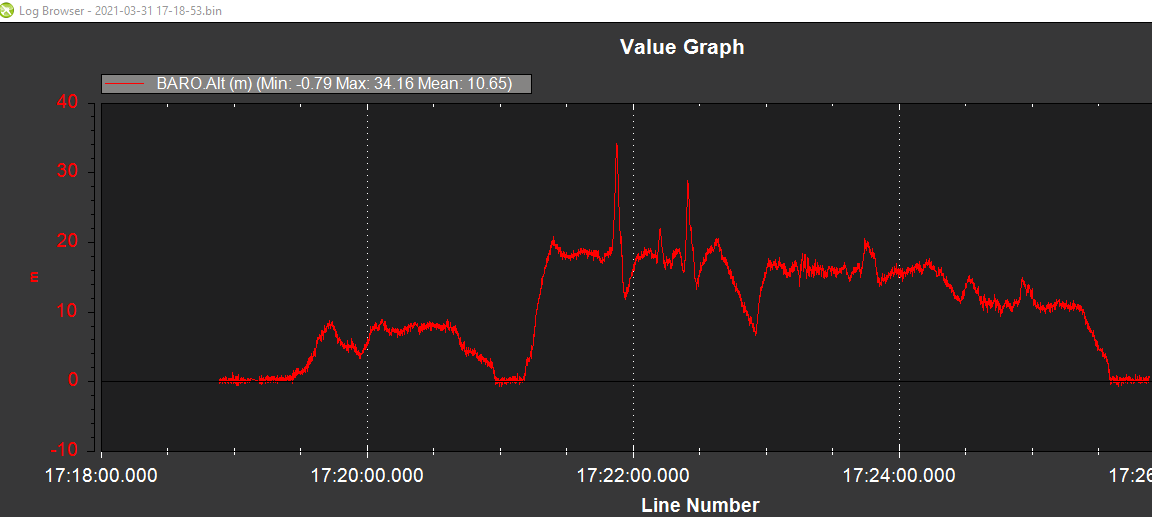
If you look at the baro there are two huge positive spikes around 17:21:50 and another spike around 17:22:30, then a significant negative spike starting around 17:22:40 last for nearly 30 seconds!
What in the world might be going on with the FC??
How can I corelate the FltPln Waypnt and param times. Seems like MP has a different time clock??
.bin https://drive.google.com/drive/u/0/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
Hey Shawn, if you have a spare min. could you read my analysis and let me know if you agree. Prior to the flight yesterday I had flown something like 26 auto flights. During previous missions I saw some altitude loss but not enough to worry me. Yesterday evening the flight was alarming! Auto mode (alt. should have been around 65 to 70 ft AGL (apprx. 19m), the Quad rapidly descended while transitioning from WP #7 to WP #8 (both set for 65ft alt. AGL) dropped to alt. of about 3m AGL! (over a 10 sec. period!)
Also, I should mention that this loss of altitude is always during yaw when the Quad yaws -/+ 180 degrees from the current heading. I do not see the loss of Alt. when rotating from about 0 to 145 degrees, only when the Quad yaws a full 180 degrees. It does not matter if the yaw is fast or extremely slow, the trigger point seems to be around 180 degrees yaw.
Here is my analysis:
Loss of Altitude 2021-03-31 17-15-21.bin file review Times 17:14:43 – 17:18:18:
###Based on the analysis below and the observed flight conditions, I believe the Baro sensor in my Pixhawk is defective.
.bin uploaded and copy of my flight plan to: https://drive.google.com/drive/u/0/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
Using UAV Log:
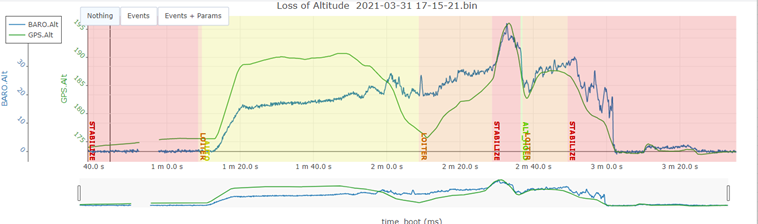
At the point in the flight when the Quad began to lose altitude on the order of 30-40ft (this occurred around WP 7 or 8 apprx. 1m50s UAVLogViewer, MP 17:16:34), (GPS shows a significant loss of altitude, while Baro does not ) I switched out of Auto into Loiter, then regained altitude and began to manually fly the Quad back to the origin (home) location.
Analysis:
At the point in time when the Quad was beginning to lose altutide (Auto mode, flight plan called for an altitude of approx. 65ft (19.67m, waypoint 7 or waypoint 8). The UAV Log View time between 1m48sec and 2m11sec) shows a significant loss of alt. (GPS) where as the Baro altitude over this same time shows no reduction of altitude. The data below from MP shows an even different picture. Based on the UAV viewer it looks like Baro is not correctly measuring the true altitude of the Quad. or GPS is a fault and sensed a loss of altitude (GPS would not consistent with what I observed so I am pretty confident that the issue is Baro).
1 - At the beginning of the loss of Altitude 17:16:34 MP: GPS_ALT=190.15m, Baro=20.42147m
2 - As the loss of altitude increases 17:16:44 MP: GPS_ALT=185.35m, Baro=25.80m (GPS showing loss of alt. Baro Gain Alt.)
3 - As the loss of altitude becomes critical 17:16:54.215 GPS_Alt=175.72. Baro=20.42m (GPS loss of alt. and very sm. Loss of Alt. Baro)
Summary: During the critical part of the mission when the Quad was exhibiting a significant loss of altitude (Automode, should have been apprx. 65ft=19.7m), GPS shows a loss of altitude of (190.15-175.72m=14.43m (47.62ft) which is consistent with what I observed. During this same time period (20 seconds) Baro showed an increase in altitude (25.8m-20.42m=5.38m (17.75ft)
Your analysis is coming along nicely! I agree, the barometer is going a bit crazy and unreliable.
I think you’ll have to pull apart that flight controller and check for foam over the barometer and maybe improve it - then retest flights. Unfortunately it looks like you’ve got a very cheap Pixhawk clone and they haven’t even bothered to put screws in the case. You’ll probably have to cut it apart with a craft knife and glue it back together later. Those cheap Pixhawk clones, usually touted as “2.4.8” are often made with factory 2nd’s parts and on very poor production lines (I’m being generous). There’s usually even some parts missing that were originally there to improve reliability. Also known for the IMUs going crazy and causing a crash.
But we all start somewhere - we’ve done the same, buy cheap, find out how it all hangs together, upgrade as required. And it’s learning too - you don’t learn much by buying a DJI that flies out of the box and cant actually be tuned or modified.
If that doesn’t help you’ll probably have to get a new flight controller of higher quality.
mRobotics might be a good choice, made in USA too, San Diego in fact. They have quality gear that many people rely on. Check out the Pixracer, lots of people use them, and you can add a case. The mRo stuff is made for incorporating into your own design really, so you’ll see a lot of their stuff doesn’t come with cases.
There’s also plenty of cheaper flight controllers these days, just comb through the list:
https://ardupilot.org/copter/docs/common-autopilots.html
Thanks Shawn, I do have a Hex Copter, unlike the cheap clone it is a 3DR Pixhawk (at least that is what is printed on the case and as I remember I did purch. from 3DR about 3.5yrs ago, equipped w/scrws). Just took it down from the storage location this morn.) Anyway, I think I will take that FC and begin there and maybe dissect the Clone at some point. I will load it with 4.0.7 at start back at square one. One diff. I would like to better vib. isolate this FC better. So, if you have any recommendations? I did see a vib. gel. padding that looked interesting.