It’s also true that while you are spinning this craft around that 2 of the motors are commanded to max, the other 2 dropped so it can yaw and there is a general lack of thrust.
Hey Shawn, so any idea when 4.1 will be released?
Regarding BATT_CRT_VOLT,10.5, BATT_LOW_VOLT,10.8… I am aware that you have cautioned me about this more than once. My rational for deviating from the BAT_*** is for this part of the testing i.e. AutoTune and some Auto Flight I want to be sure I can get as much done as possible before Bat triggers RTL. My Taranis X9D+ and Master Radio TX16S Max are setup so that Bat volt is annunciated every .1 V starting at 11.8 V. When my bat reaches 11.3 I get a warning annunciation to “BEGIN LANDING APPROACH”, when the bat reaches 11.0 I get a warning siren and annunciation that I “MUST LAND”. This gives me a lot of margin over the 10.5 and 10.8 so I will not reach these very low bat. levels. I will up my current settings once AutoTune / Auto testing is complete. I never push it past the MUST LAND annunciation. PS-I have been flying electric airplanes for nearly 20 years now, so I am very familiar with LiPo bat. and considerations.
Regarding my Pixhawk and foam over the Baro sensor. My Pixhawk is a Clone, there are no screws on the top side. I installed this on my Quad mounting platform 3.5 years ago, so I do not remember if there are screws on the bot. side of the Pixhawk case. To remove the Pixhawk (double back foam tape very old now) at this stage would be very very difficult and introduce a lot changes and subject me to backtracking on a lot of testing. So, I will try your covering the Pixhawk as a workaround to reduce propwash.
I will report back after trying the prop wash workaround.
One more thing Shawn, would you mind telling which params you reviewed while looking at the “Loss of Altitude while executing a Yaw”. Also, do you use UAV Log Viewer or some other tools when you review logs? Thanks!
Hey Dave, what would you expect i.e. what is normal, when executing a Yaw?
Do you think this is a propwash issue or possibly something else?
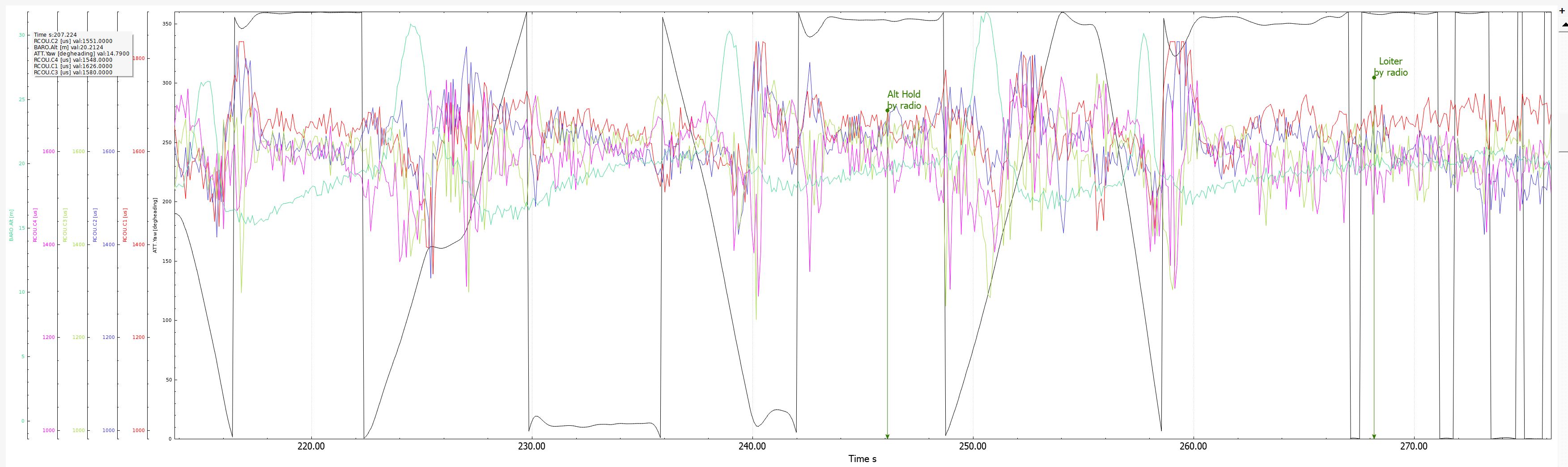
I think it’s lack of thrust stability to make the maneuver you have commanded. I’ll use Mission Planner here APM Planner is hard to see on my monitor as per the screen shot above. I would encourage you to plot this yourself for future reference. Looking at Commanded Motor outputs can tell you a lot.
You are giving full stick Yaw which requires that 2 motors speed up and 2 slow down. If the 2 motors that speed up reach max, which they do, then lack of stability will result. The other 2 motors have slowed down to almost min. Now the average available thrust is less and it can’t maintain altitude.
Wow, excellent Dave, thanks very much for the analysis and quick tutorial!  I did not mention, and probably should have, if I execute a slower Yaw then the loss of alt. anomaly is not evident. At lest not evident visually.
I did not mention, and probably should have, if I execute a slower Yaw then the loss of alt. anomaly is not evident. At lest not evident visually.
I will certainly plot this and spend some time analyzing the plot. I save all my FltTst reports along with pertinent plots.
I have added a aerodynamic prop wash protector to see if that makes any difference.
Things can go further south if you also command a Pitch and or Roll during this event. That can cause a crash. Picture Motor 2 (left rear) which is already at Max and you also command a Pitch forward and a Roll right. All 3 require that Motor 2 speed up. This is why it’s important to have the right Thrust/weight ratio.
Dave, several days ago you suggested a heavier bat. as a course of action regarding the Thrust/Weight Ratio for this Quad. Is this the course of action you would recommend regarding the “Thrust/Weight Ratio” you have identified?
The link is from my flight this morn. with the PropWash Shield in place. This shield did not make any difference in the Yaw/Altitude Loss problem. Even the slow rotations result in loss of some altitude. It seems like when the Quad is at about 180 degrees from the start of the Yaw is when the alt. loss begins to become very noticeable. The alt. loss does not seem as significant during Stab. mode??
.bin and photo of prop wash shield installed.
https://drive.google.com/drive/u/0/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
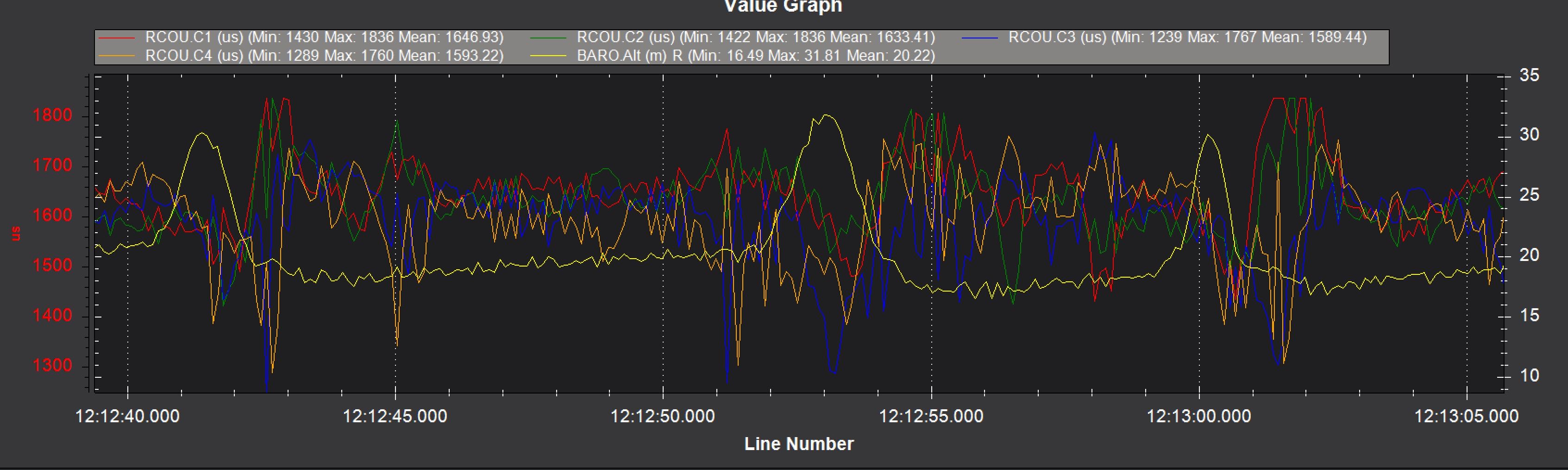
That log demonstrates what I was saying even more because now you are getting Thrust Loss messages. Your average motor output at hover is ~1600 so perhaps it’s a bit too heavy now.
Normal to have drop the first few times you fly. I seen that after a few flight this will go away and the craft will hold well. you can see the issue at times when the mid stick will drop or raise the bird "GPS to Stabilize via radio comand ". then magically will work perfectly with not tuning the second or third flight. one way to to acclimate the Fc is to fly in Ground mode for a few this will help a lot later. Naturally if you made a lot of changes just delete the config and start new.
Dave/Shawn, well, I am now back in one of those corners not knowing what to do or how to proceed. Actually the flight this morning was using the bat. that weighs less than the newest larger bat.
Any recommendation on how to proceed??
Is the CG in the geometrical center?
More thrust or less weight. What props do you have?
Amilcar, yes the CG is correct. Worked fine (long history included in this long ongoing file) but now after attempting Autotune which failed i.e. Roll Oscillation introduced, then reversion of the Roll params pre Autotune the loss of altitude during Yaw problem has resurfaced. Originally resolved this with MOT_THRTS_HOVER.
Dave, the Quad has been running the APC 10/4.5 props since I put it together.
OK, what motors (size and Kv)? We know you are on 3S (a mistake IMO, would have built for 4S*), and what is the Take-Off weight with battery?
*Junker was 4S and I had one on a 6S.
Yes in hindsight a 4S would have been a better choice. ESCs will handle it but motors are the limitation.
A question Dave, several days ago you were advocating a larger heaver battery (3S not 4S). I get the feeling you have now changed your position?
That said, post param. melt down and pre Autotune Roll problem, the Quad did experience an issue with loss of altitude during Loiter / AltHld (around late Feb). Shawn recommended MOT_THST_HOVER which I did do and this seemed to clear up the issue with loss of altitude when executing Yaw (this was the original issue that started this long discussion).
The Motor KV is 980 size is 32 x 28 mm (see ecalc data) uploaded.
https://drive.google.com/drive/u/0/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
What is the take off weight? MOT_THST_HOVER is a learned value not a set value.
That motor data says they are 2826 980Kv motors. As I said before these are not suited for Multirotor use. I would suggest you re-build this craft with proper motors and for 4S power.
Good luck.
Dave, you did not respond to my question about your advice a few days ago to use a heaver battery (again you were not suggesting a 4S but a heavier 3S). So, why did you suggest a heavier battery and now pretty much reversed your position? Just curious?
I would have looked at average motor output at hover and the MOT_THST_HOVER value. Don’t recall now but perhaps it was wrong. Simple as that. But now you do not have sufficient thrust/weight.