Shawn / Dave, I am not sure how to proceed now. I am wondering if the history of this Quad has become lost in the translation? Perhaps a quick review of the history would be appropriate.
The Prop adapters are tight! If I attempt to tighten them any more it will likely strip the threads. I cannot budge the props while holding the motor case.
The Quad was at a VERY VERY stable flight condition (8mar21 some of the table changes incorporated, but not all). The reason I did not include all the table param mods, is from experience, some of the changes introduce instability into the Quad. i.e. Stab and Loiter, the Quad exhibits a lot of twitching / erratic motion (I think this is primarily Roll axis). The instability is large enough to make it difficult to control the Quad on TO/Flight/Landing.
So, as I say, from the first time I attempted in implement the full table param changes the Quad went from being a very very stable Quad (with TX trim) to a VERY VERY unstable Quad. So, around the 4mar I went back to square one i.e. reloaded the params without change and resolved the issue with TX trims so that the Quad now flys VERY VERY stable without TX trims and without any table param modifications. Then I began introducing table param changes around the 8th of Mar (see below). The Quad is still VERY VERY stable after the initial table param changes. The instability begins when I introduce the remaining table param changes (see below).
Dave, are you aware that there was a point (partial inclusion of Shawn’s Tbl. params) where the Quad was Solid As A Rock, Z Vib low, All TX Trims centered! It was so stable in STAB mode that it looks like it is in Loiter mode! The param (Shawn’s tbl) all flight modes, the Quad is VERY VERY stable (see below) shown below.
8mar21
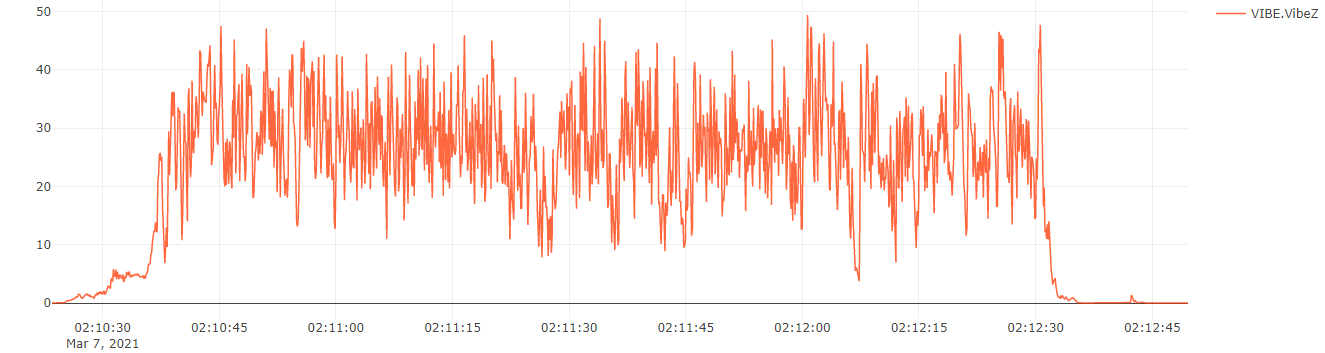
Table params. partial modified, QUAD nice to fly, Flys VERY VERY stable, Z Vib mean apprx. 21.67, TX trims now centered :
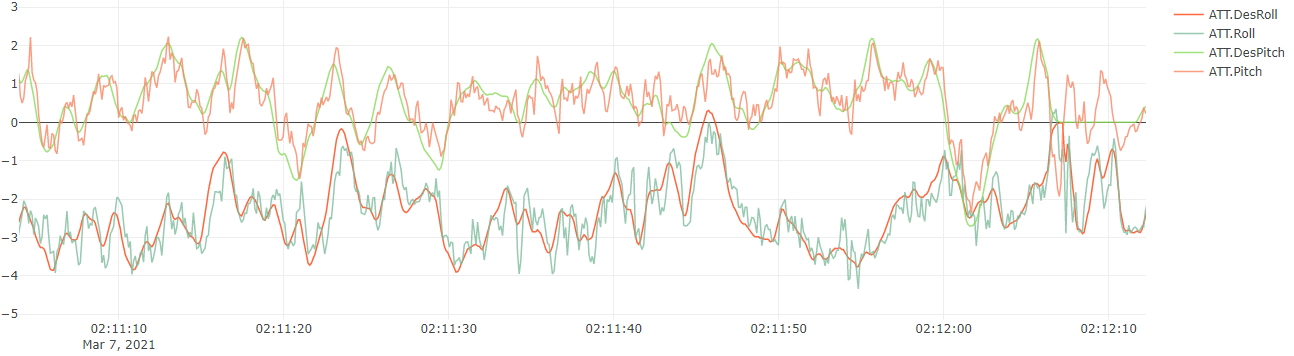
*Quad is VERY VERY stable, in all modes of flight:
ATC_ACCEL_Y_MAX = 27000
ATC_RAT_PIT_FLTE = 0
ATC_RAT_RLL_FLTE = 0
ATC_RAT_YAW_FLTD = 0
INS_ACCEL_FILTER = 20
MOT_THST_EXPO = .65
MOT_THST_HOVER = .2209667
BATT_ARM__VOLT = 11
BATT_LOW_VOLT = 10.5 (I realize this is lower than recommended)
MOT_BAT_VOLT_MAX = 12.6
MOT_BAT_VOLT_MIN = 9.9
When things begin to deteriorate i.e. instability introduced in all flight modes:
**** STAB and Loiter (twitching / erratic roll), when I revised the following parameters
ATC_ACCEL_P_MAX = 116700, was 110000 when stable 8mar21
ATC_ACCEL_R_MAX = 116700, was 110000 when stable 8mar21
ATC_RAT_PIT_FLTD = 21, was 20 when stable 8mar21
ATC_RAT_PIT_FLTT = 21, was 20 when stable 8mar21
ATC_RAT_RLL_FLTD = 21, was 20 when stable 8mar21
ATC_RAT_RLL_FLTT = 21, was 20 when stable 8mar21
ATC_RAT_YAW_FLTE = 2, was 2.5 when stable 8mar21
ATC_RAT_YAW_FLTT = 21, was 20 when stable 8mar21
INS_GYRO_FILTER =42, was 20 when stable 8mar21
The table below shows the bat / fence settings, green are changes following the Stable Flight.
12mar21:
In an attempt to reduce / eliminate the severe twitching / erratic roll, per instructions I changed:
ATC_ANG_RLL_P = 6.5, was 4.5
ATC_ANG_PIT_P = 6.5, was 4.5
ATC_ACCEL_P_MAX = 80000
ATC_ACCEL_R_MAX = 80000
This reduced the twitching / erratic behavior, but did not get me back to the stable flight.
Not sure what course of action to pursue? Please advise.