This mornings flt. was very smooth, TO/Stab/Loiter. The Quad is once again back to a stable flyable state, A BIG THANKS! Did not have to modify the ATC_ANG_RLL_P or ATC_ANG_PIT_P params.
For my edification, do you think the ATC_RAT for RLL / PIT are the primary reasons the Quad is flying better?
I enabled the Notch filter recording so we can proceed with the Notch Filter Tuning.
The Harmonic Notch filter is working well, you can set these now to turn off the additional logging:
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
I’m a bit surprised you didn’t set
INS_GYRO_FILTER,20
because it’s still at 42 there. That’s OK since it’s working, and I always thought it probably should work at some stage.
You only changed this:
ATC_RAT_PIT_D,0.007
and it’s doing it’s job, pitch is working a little better than it did, and better than roll.
So you need to also change this:
ATC_RAT_RLL_D,0.007
Attitude control is going OK, as good as it every was, and actually somewhat the same as Daves Junker. It seems the Harmonic Notch filter took away the worst of the vibrations and noise that was affecting control.
I think you could run Autotune one axis at a time using these in turn:
AUTOTUNE_AXES,1
AUTOTUNE_AXES,2
AUTOTUNE_AXES,4
If battery permits you can run pitch and roll together: AUTOTUNE_AXES,3
Read up on Autotune, it needs a fair bit of space and the quad will move around quite a lot.
I’m thankful for @dkemxr Daves exercise in setting up his Junker - it confirms two things for me:
Primarily both of these extremely similar quads can fly, and in an almost identical manner according to logs.
They both have control issues that are not necessarily easy to find the source of in logs - I suspect arms, cheap motors, maybe something in the basic design/dimensions/materials…
I’m interested to hear Daves opinion there if he considers it worthwhile spending any more time on it
We’ve had a F550 hex style DJI Flamewheel set up that was similar, could never quite tune out the niggling little stability issues - until it crashed heavily due to suspected IMU failure.
Hey Shawn @xfacta- The original plan was to take a F450 frame out of the pile, throw some parts on it and see what it does on Defaults. I think I crashed this frame in 2015 and forgot about it. Anyway, flyable but as you say not that great and there are some similarities to Greg’s quad. I’m going to replace the props and then do a proper tune (manual) on the Junker and see what’s possible.
Some observations:
I’m on 4S.
The FC mount I’m using has super soft balls which accounts for the relatively low Vibes but I have found that too soft has it’s own set of problems.
I updated to Latest Master because everything else I am flying is on it so it’s not an Apples/Apples comparison. But I haven’t enabled any magic available on Master that isn’t available on Stable.
But it should be fun to see what can be accomplished with the Junker none the less!
Hey Shawn, thanks again for all the special attention!
I will start AutoTune in a day or so, weather in SoCa now.
I do have a few more questions, if you would not mind, I would appreciate your input.
1 - Per Dave’s recommendation I am going to test a heavier bat. (4oz), higher MA and C rating, 3S. Do you think I will need to mod. any params? If so what should I look for in the logs?
2 - When you say “attitude control is ok” what params are you looking at / comparing? When I graph ATT Des ver ATT Actual for Roll / Pitch the Desired ver Actual look very very similar? Is the amount of dif. more than would be expected with a better performing Quad?
3 - Any suggestions regarding educating my self regarding reading the logs? I have looked at the dated material (video and doc), but there is a lot more than this information provides.
4 - You were concerned that the prop. compression collet was slipping. What param(s) were you looking at?
That craft is flying pretty well now! Certainly better than my Junker in it’s present state of tune. Z-vibes could be lower but that’s tough with these frames. Mine are ~1/2 of yours and perhaps due to the FC mount balls I’m using and maybe just a better balanced drive. Although I made no attempt to balance these self-tightening props.
Hey Dave, funny thing about the Z vib, it seems to vary. I thought I had it under control (down around a mean of 20 and max of 28), but as you can see it has increased. Not sure why is is varying so much!?
What frame would you recommend?
That’s a good question. Most people buy the F450 frames to get into a drone at low cost. I get this, and have done the same in the past. The good frames for 10" props are ~$100. iFlight, Lumenier, HolyBro make them. Some other exotics for X-class racing even more expensive.
That said I have another quad that uses the F450 frame plates and extended G10 arms with 13" props. This craft flies pretty well and on 6S for a looong time. If I was building another from scratch I would pony up the $100 I think These days I have been building smaller quads in the 3-5" range. And most recently on sub 250g craft.
if the cell count (and voltage) stays the same then there’s no changes. Very few people use the mAh related failsafe settings. Extra info: Even though mAh is better than voltage for determining battery life, so often we unplug and replug the battery, or reboot the flight controller during testing, zeroing the mAh used data.
Yes we just mainly look at the actual vs desired pitch and roll. Then later we’ll check yaw too if it’s an issue. There’s always less trouble with yaw. There are actually a whole lot of other logged data that can be used to look at for “innovations” and what PIDs and things are doing. For now the visuals of actual vs desired is OK to use.
I’ve really just done a lot of reading through the complete parameter list, through all the threads where people are doing tuning or having tuning issues, and in particular the Tuning Guide. And trying to figure out our own tuning troubles we find. Tuning Process Instructions — Copter documentation
The collets were just a guess, there was no actual evidence. Grasping at straws since not much else was helping. You’d expect to see one of the motor outputs being commanded much higher or go to maximum if a prop or collet was slipping. Although cheap, they are not a good choice for multirotors.
Comparison:
A plane is usually doing constant RPM and there’s roughly a constant load on the prop, collet and motor. Even when you throttle back, you dont need the prop to be braked.
With a multirotor the output is being commanded to “Faster! Now!” then “Slower, slower, Faster again!” within every revolution or at least every couple of revolutions. And the ESCs actively brake the motor and can even return some current to the battery during the braking. So there’s a lot of varying load that has been known to unscrew props and adapters from their motor.
With the Z vibe, I’ve seen other multirotors vary across flights without making any changes. So far we are putting it down to the weather - temperature affecting stiffness of the antivibration foam or gel, and even stiffness of the props (maybe). You probably wouldn’t get so much variation using one of the silicon ball based antivibration plates.
For a frame combo for the future, these two are sorted out, come with the correct motors and props and should be easy to get flying, and reliable. They are not cheap, but think of the head-start you get.
Edu 450, needs a flight controller and GPS, otherwise complete
You should be able to find a Hex/Proficnc dealer in your region. They’ll be selling the Cubes.
Here’s a Edu450 doing it’s thing: https://www.youtube.com/watch?v=ytW538e_cQw
These are a great option after you’ve done with taking your existing quad to the limits, and before you start to get into sourcing your own frames, motors, electronics and all for more customised rigs.
Oh yeah and for point 2 motor outputs are a good indicator too, RCout1,2,3,4 for example.
There’s lots of things to look at, the story is endless.
EDIT:
Also I haven’t placed too much emphasis on yaw because it gives very little trouble in isolation.
Yaw issues are almost always caused by motor mount or frame-twist physical problems. Or pitch and roll attitude control is so poor that any attempt at yaw causes worse behaviour or Yaw control is reduced.
Yaw really only has a couple of parameters we can easily and safely change to adjust it’s behaviour. In fact Autotune almost always produces workable Yaw behaviour and you only have to tweak ATC_ACCEL_Y_MAX to suit your intended purpose (camera ship, acro etc)
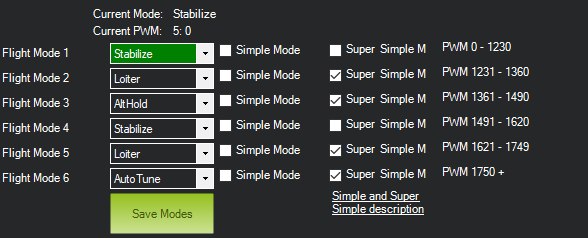
Hey Shawn, completed Autotune this morning (Roll / Pitch yesterday and Yaw this morning). I should mention (I think I did the Autotune procedure correctly). The reason I say “I think I did the Autotune procedure correctly” is the APM doc. states " Set an RC channel Auxiliary Function switch or an Auxiliary Function Switch (prior to version 4.0) to AutoTune to allow you to turn the auto tuning on/off with the a switch"
The way I did the autotune is: in the flight modes I set the 3 pos sw for Stab/Loiter/AlHld, and the 2 pos sw for Normal/Autotune. The TO then Stab/Loiter/AltHold (in that order for my flt.) (2 pos sw in Normal, then once in AltHld selected the 2 pos sw. to Autotune. Let the Quad finish autotune, and left the 2 pos. sw. in Autotune (but moved the 3 pos sw to Stab for landing, changing the flt mode of course), landed and removed power. I am questioning if I did this correctly because this was done via flt. mode selection.
Roll and Pitch look better (based on my limited knowledge), but Yaw looks horrible!?
This would not save the Tuned parameters. You disarmed in Stabilize, need to disarm in Auto Tune. This is very simple. After Auto Tune completes, change nothing, Land and disarm.
Use Mission Planners Parameter Compare function for this log and the previous one and see what changed. I would guess nothing.
RTL was from the Fence you configured.
Note: I’m not sure it matters but I would refrain from using Simple or Super Simple mode when running Auto Tune. And run Auto Tune from Loiter or PosHold not AltHold. Then you won’t have to re-position while it’s running unless you are in a small area.
I did do a dif. on the .bins, some small changes but since I do not know what to expect i.e. the magnitude of change, it sort looked like it worked. I have the pre-AutoTune .param file saved, as well as all the .param files during the AutoTune. I can revert back if needed.
I will redo this time and setup with a sw dedicated to AutoTune so that I can leave AT on, land, power off and save the AutoTune params, per the doc.
The doc. says to use AltHld, great to know that I can use Loiter, that will help so I do not have to re-position.
Unless some of the ATC parameters changed then nothing was saved. You will see some small changes in some other parameters that have nothing to do with tuning every time you fly. I would check it but the old .bin file has been replaced in that link with the auto tuned file.
Actually you can tell just from the Auto Tune log that they were not saved. I have never seen the pitch and roll parameters remain identical thru an Auto Tune and they still are in this log.