Shawn, Ok looks like I have mostly recovered from the corrupted params list. Loaded the last know good param and strarting from there. This is the param list where I 1st noticed the drift, so I still have a drift issue. I want to resolve this drift issue before proceeding on to the param changes in the table you provided, then on to auto tune, then notch tune (maybe notch tune before autotune??)
The drift is to the left, does not seem to include a forward pitch component, or perhaps a very small frwd pitch component. Drift in all modes: Stab, Loiter, AltHld. Performed a recal of ACCEL this morn. based on the prop plane. Having to shim up the right side struts to get the prop plane level. This may be of interest since the Quad drifts to the left! The Pixhawk is so close to the same plane as the props that I actually could use it to cal ACCEL (which is what I had previously done, no drift).
Other than the slight drift the Quad is very very stable, like it was before everything came apart. If not for the drift it would be anchored in the sky when in Loiter! Very nice to fly (again), very precise control again (can easily land on a 12" square stepping stone).
I was going to suggest redo the RC transmitter calibration.
You could even redo the accel calibrations, being super-careful to get the angles correct (ie: roll to 90 degrees when requested). I wouldn’t reload any of the old parameters though. Many of those parameters listed shouldn’t be manually set, and the lower table doesn’t affect what you’re dealing with.
In that latest log, it looks stable enough to run an Autotune.
You current logging is wrong.
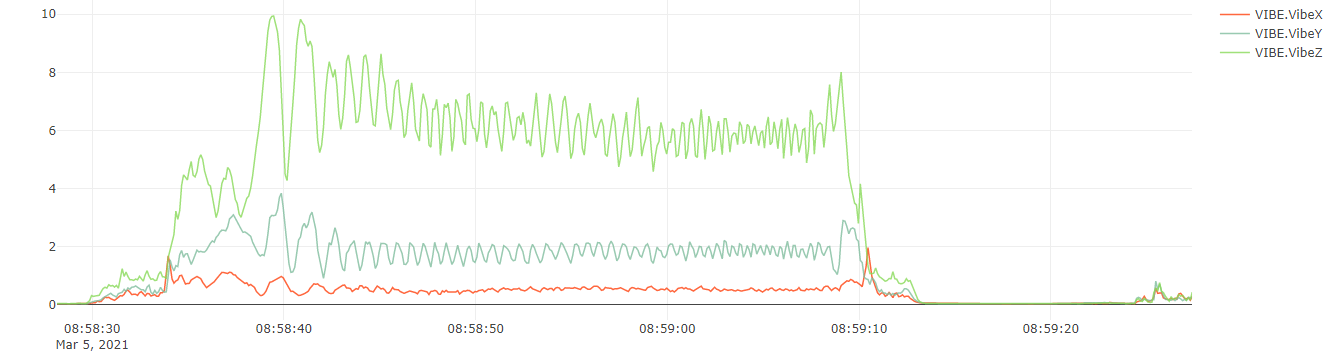
Z axis vibrations are a bit high - that could cause issues. See if wires or something is touching the flight controller or something is vibrating around.
Once Autotune has run and moved the PIDs in the right direction, you could start increasing filter values (as per the spreadsheet) and run Autotune again to get a super-tight tune.
Shawn, as part of the ACCEL cal I did do a complete TX recal, here are the values:
1st col.= MP; 2nd col.= Radio
Roll (Ail.): 1500 1510
Pitch (Elev.): 1500 1509
Yaw (Rud.): 1500 1511
During the ACCEL recal I litreally took a 1.5’ x 2’ scare and held the Quad against it to make sure I got the Quad as close to 90 degrees all axis (except for the inverted axis) and held the Quad rock steady as I accepted each orientation.
So if I run autotune what do I do about the drift, or just assume the drift will be fixed by autotune?
Good work.
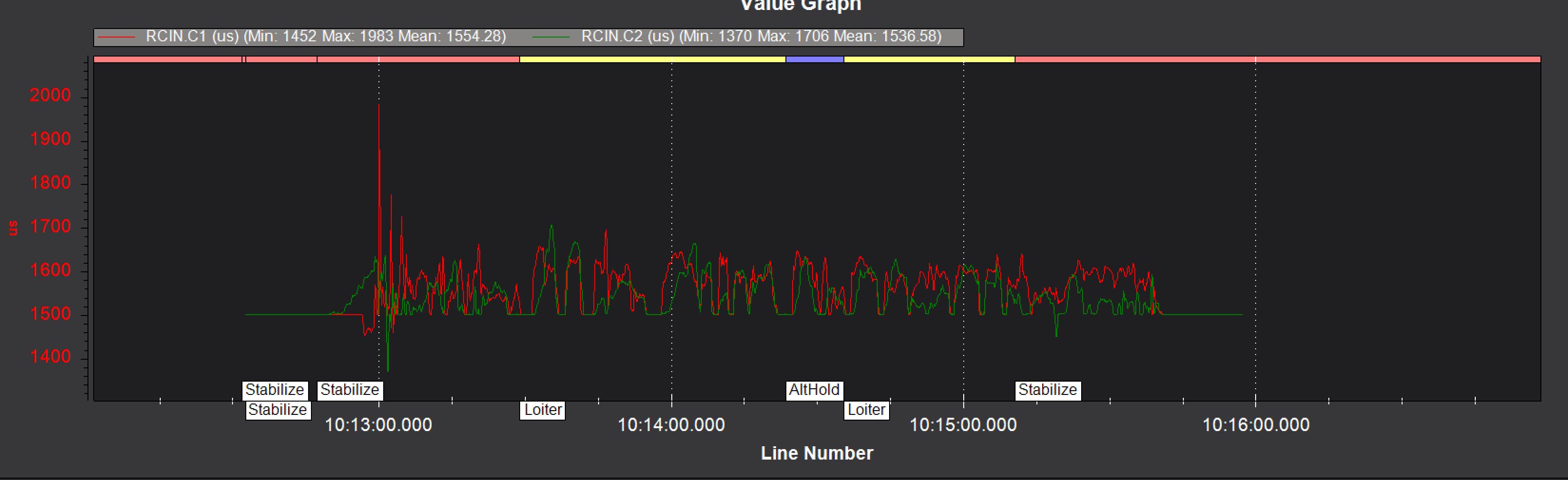
The drift is like the RC transmitter is telling the craft to move but I cant quite see it in logs.
Loiter mode shouldnt drift around at all when it’s working properly.
You could try making RC1_DZ and RC2_DZ bigger, 30 instead of 20, but first try Autotrim actually. It should modify those AHRS_TRIM parameters for you. Autotrim is a bit easier than Savetrim since you dont need to set up transmitter switches and so on. https://ardupilot.org/copter/docs/autotrim.html#autotrim
We’ve used it successfully before with an old aluminium frame that was no longer perfectly straight/level/true after numerous crashes and repairs.
Every time I perform ACCEL Cal I have been selecting both the top button and the lower button, is this incorrect, should I have been only selecting the top cal. button?
Shawn, the “Save Trim” you are suggesting is not supported by the MP v.1.3.74. I remember this from an older ver. of MP, but it is not part of the current MP??
You typically do not need to use Save Trim, I never do. If the accelerometer calibration is done correctly that takes care of it for assisted modes. My “trim” for Stabilize mode is my thumbs…
Well my issue is I have tried recal ACCEL several times and it does not fix the issue (drift). I agree with what you say about TX Stick control while in Stab. (to an extent), but the if you look back through the dialog with Shawn my Quad (for some unknown reason) drifts, even in Loiter with 3D GPS. This drift started during a process of changing params so I could autotune and gyro notch, all went to he** and I am now recovering but I have this issue of drift that I have not been able to resolve and Shawn is a bit at a loss, so saving trim is about the only recourse unless you have some suggestions. Again, ACCEL cal has been done multiple times making sure the Quad is VERY level, at 90 degrees for: nose dwn, up, side right and side left.
Could you post a log of simply arming and slight throttle so it doesn’t leave the ground? Level ground would be good. And before doing that perform a radio calibration. All transmitter Trims centered of course.
It’s just that using Trim to fix a Loiter position problem is a band-aid and not addressing the basic problem (whatever that is). I see in the last log you posted you are giving it pitch and roll stick input in one direction while in Loiter with zero speed. Presumably you are applying stick input to keep the craft in position? If so this isn’t right and trimming it isn’t the right approach. Need to get at the basic problem. Granted I’m not sure what that is…
Dave, ok just recaled Tx (pic of “recal TX trims centered 150PM”), .bin uploaded (Tx throttle advanced to the point that the Quad is becoming very light on the landing struts very near liftoff), TO area confirmed to be level (level used, bubble between marks). https://drive.google.com/drive/u/0/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
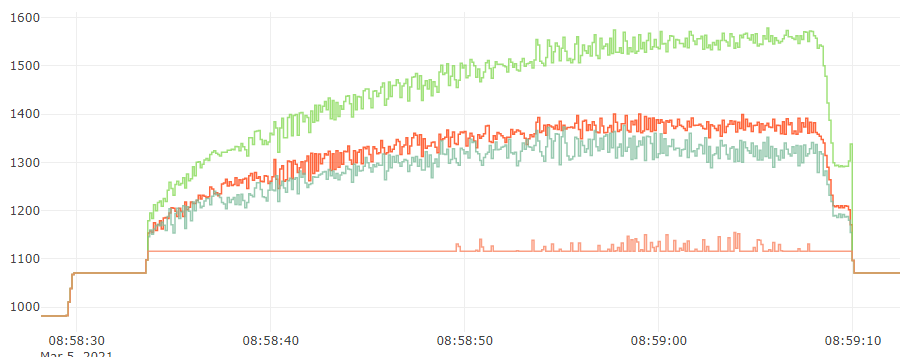
Hey Dave, I uploaded the screen capture for RCOU, something looks really wrong here. Can you look at #4 RCOU. Why would it look like this and so different than the 3 other RCOU outputs?
Hi Greg,
there’s a real cyclic thing going on in the vibrations, so I guess the frame is shaking around somewhat while throttling up but still touching the ground
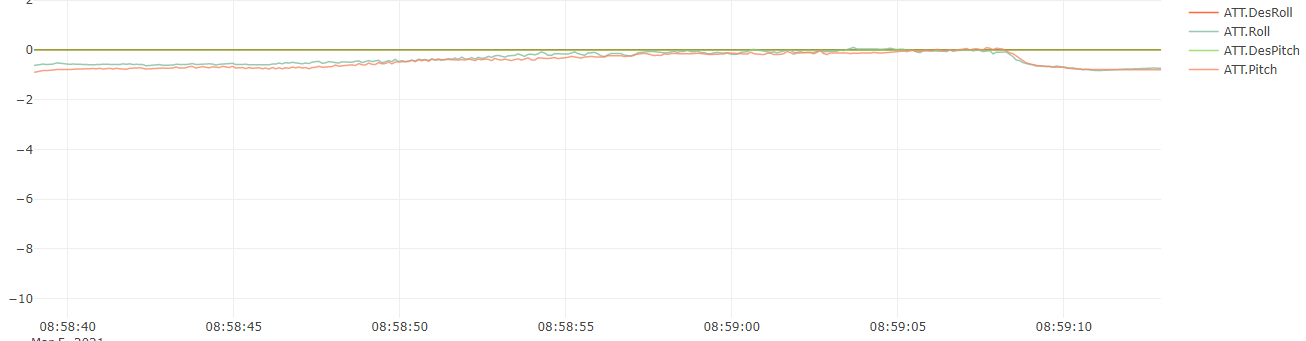
I think the motor outputs are probably OK and just differ because of slight roll and pitch in attitude that the flight controller is trying to correct, but of course there’s not enough thrust at that stage
In the previous log the RCout values were relatively equal and as expected.
The strange thing is all the default values you have there (for tuning) should work OK with that quad, at least be stable enough to run Autotune and see where the PIDs go…
Is there a possibility those prop adapters are slipping on the motor shafts? Or the props slipping on the adapters? Normally you’d see that in the RCout (one output going very high as the prop slips), just trying to think of any possibilities.
I’m still checking more in you logs but so far I cant see anything definitive for the “Trim” problem.
Hey Shawn, thanks for getting back to me. This may be a real oddball, one you guys have not seen?
Dave suggest conducting a short flight, Stab then Loiter, with the TX trims centered and MP reporting 1500us for Roll, Pitch and Yaw. Then send the file to you guys. Kind of done this already, but I can certainly do it again. I know what the flight will be like, I will have to continuously use the TX Roll / Pitch and maybe Yaw to correct the Quad (especially in TO and Stab.), but I can do that.
Also, if you noticed I did edit the BAT so that as the Bat Volt declines the PIDs are accordingly adjusted (so I understand anyway).