Hello everyone.
I am assembling the first copter on Ardupilot. This is a 7-inch copter on a lightweight TBS Auero frame with 2203.5 motors.
I make settings using the Ardupilot wiki, and now I have stopped on a difficult topic for me - filtering gyroscope noise. From the wiki, I did not understand which FFT graphs are the norm in decibels and the shape of the curves, so I post logs: one log is the default filter settings for 7 inches (only LPF 57Hz), the second log is the hntch enabled by esc with 4 harmonics (autotune has not done yet). Firmware 4.4-beta5.
default_lpf57.bin
hntch-esc_4h.bin
You should be able to use these:
INS_HNTCH_HMNCS,3
INS_HNTCH_OPTS,16
and all other settings were the same as what you have now.
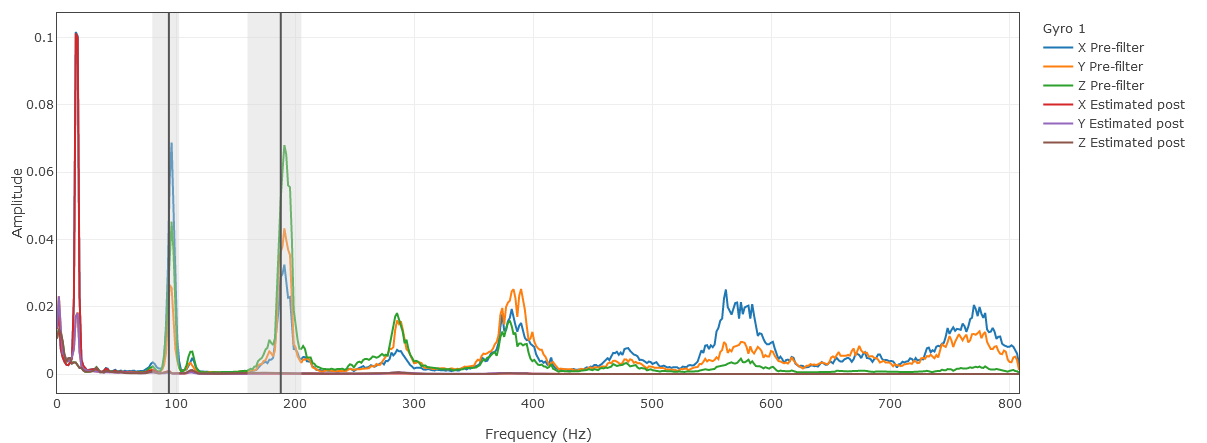
The problem is that noise spike at about 12Hz to 20Hz - as if there is something loose, or a gimbal that is not secured for test filghts.
You will need to fix whatever is causing that before Autotune will work properly, even manual tuning wont have desired effect while that rogue noise is there in those low frequencies.
Thanks for the analysis! I will try to fix rogue noise and report the results.