Development question: I’m trying to obtain the raw form of the gyro outputs from the backend. Following ins.update() in main loop eventually takes me to the AP_InertialSensor class update() function (Lines 1535 to 1537 in AP_InertialSensor.cpp) :
for (uint8_t i=0; i<_backend_count; i++) {
_backends[i]->update();
}
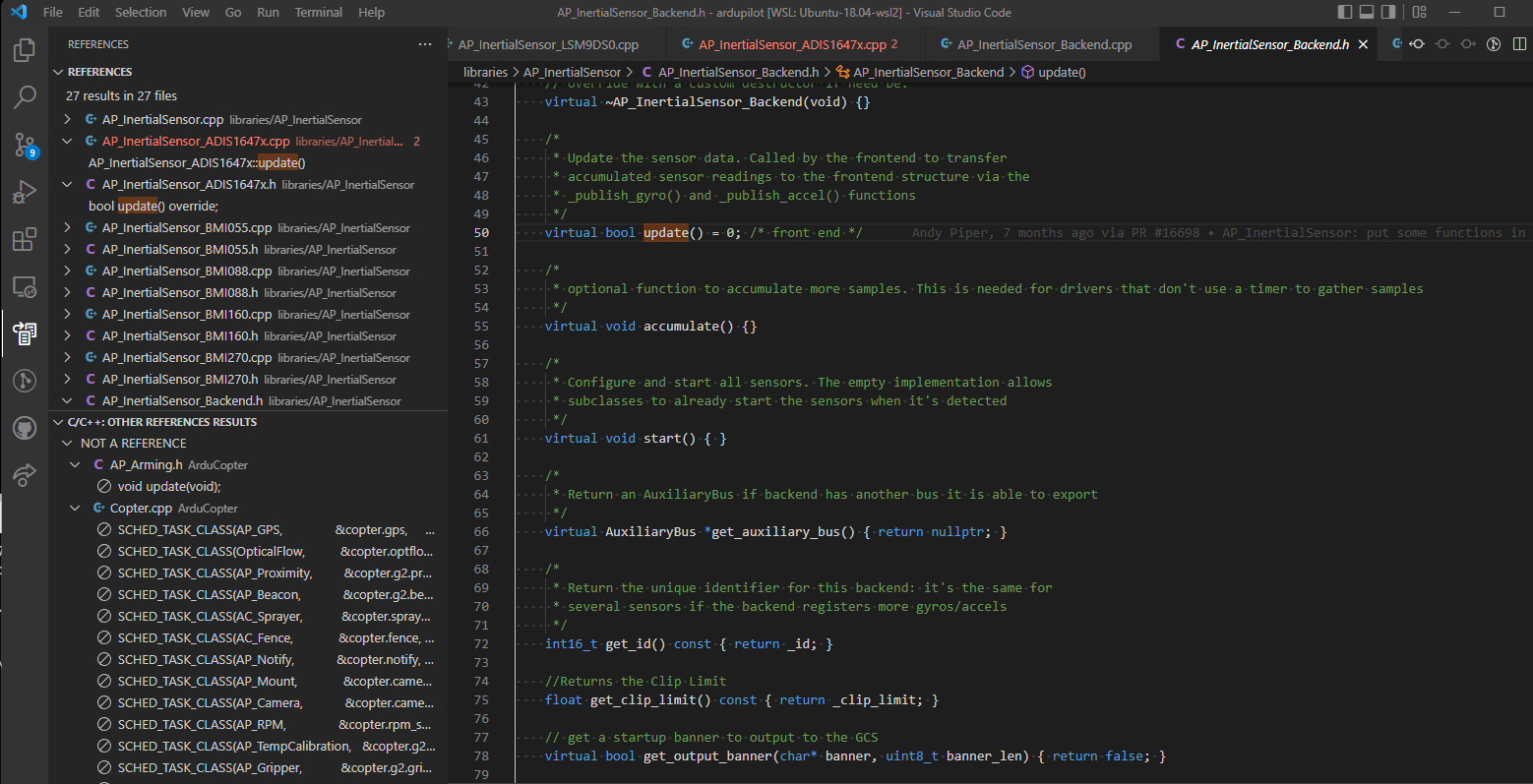
This call to update the backend of the inertial sensor takes me to a virtual function within the AP_InertialSensor_Backend class (Line 50 in AP_InertialSensor_Backend.h):
virtual bool update() = 0;
This function is virtual and I cant find an override in AP_InertialSensor_Backend.cpp so i’ve hit a dead end. What function is to occur here to update the INS values (ideally getting the raw forms before any processing/filtering) ?