MSP is the Multiwii Serial Protocol, Betaflight started as a fork of Cleanflight, which was a port of 8bit Multiwii to STM32. So it is nothing special that Betaflight supports MSP.
It is its main communication protocol.
Ardupilot already supports a few different telemetry protocols, perhaps MSP gets added someday. Until then have a look here:
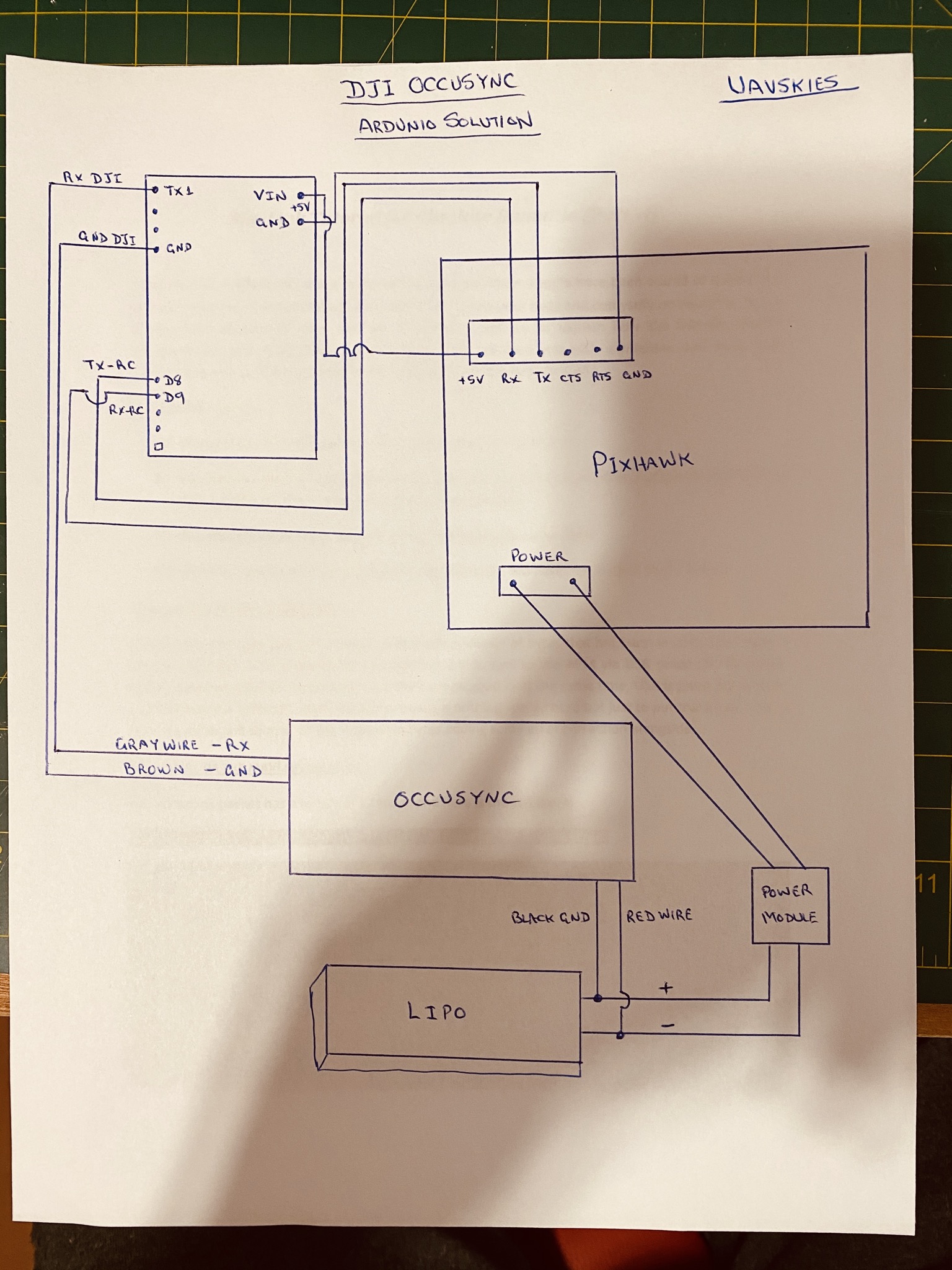
I was trying this Arduino solution but unable to run the program. Little confused besides the library files what other files needs to be copied to Arduino and where to copy them?
I posted the question on GitHub and waiting for a reply.
I said “perhaps” MSP will be added someday, not that it will be added.
Ich habe gesagt, MSP wird “vielleicht irgendwann” hinzugefügt, nicht das es hinzugefügt wird.
The plane has room for the DJI FPV stuff and an autopilot, but not for a 3g Arduino?
You have to install the Arduino IDE on your computer, to be able to compile and write the .ino file (sketch) to the arduino.
The libraries should be copied to the Arduino IDEs sketch folder.
There are many tutorials out there showing how to do it all.
On Windows-PC copy the library folders (Altsoftserial, GCS_Mavlink, MSP) to \documents\arduino\libraries\ and restart the Arduino IDE if it was still running. Make sure you close all instances of the IDE that may be running.
Now I get it. You converted a Lidl toss glider to RC with autopilot and FPV. Very cool!
An Arduino pro mini is 33x18x6mm without pins, that should be about the size of the FC, but I understand that there is not much room in the plane.
But that’s exactly what I’m after, it would be so nice and easy if ardupilot msp could. Since ardupilot has been running on matek boards with an integrated osd and the stupid minimosb is finally over, the world has become so much more beautiful.
Schachti are you willing to partially fund the development of this feature (only MSP support for DJI Occusync)? (I am), the development team is looking for funding. If you are, please ping @iampete
Looks like you have the Occulsync HD unit there - this will (with the latest fw) support Mav telemetry directly.
That Arduino converter is for the new DJI HD goggles which only take MSP
Yes I am testing it against DJI Ocusync. I Didn’t realize this Arduino solution is For the new DJI racing goggles only. I have those goggles to. I will try it with the FPV goggles.
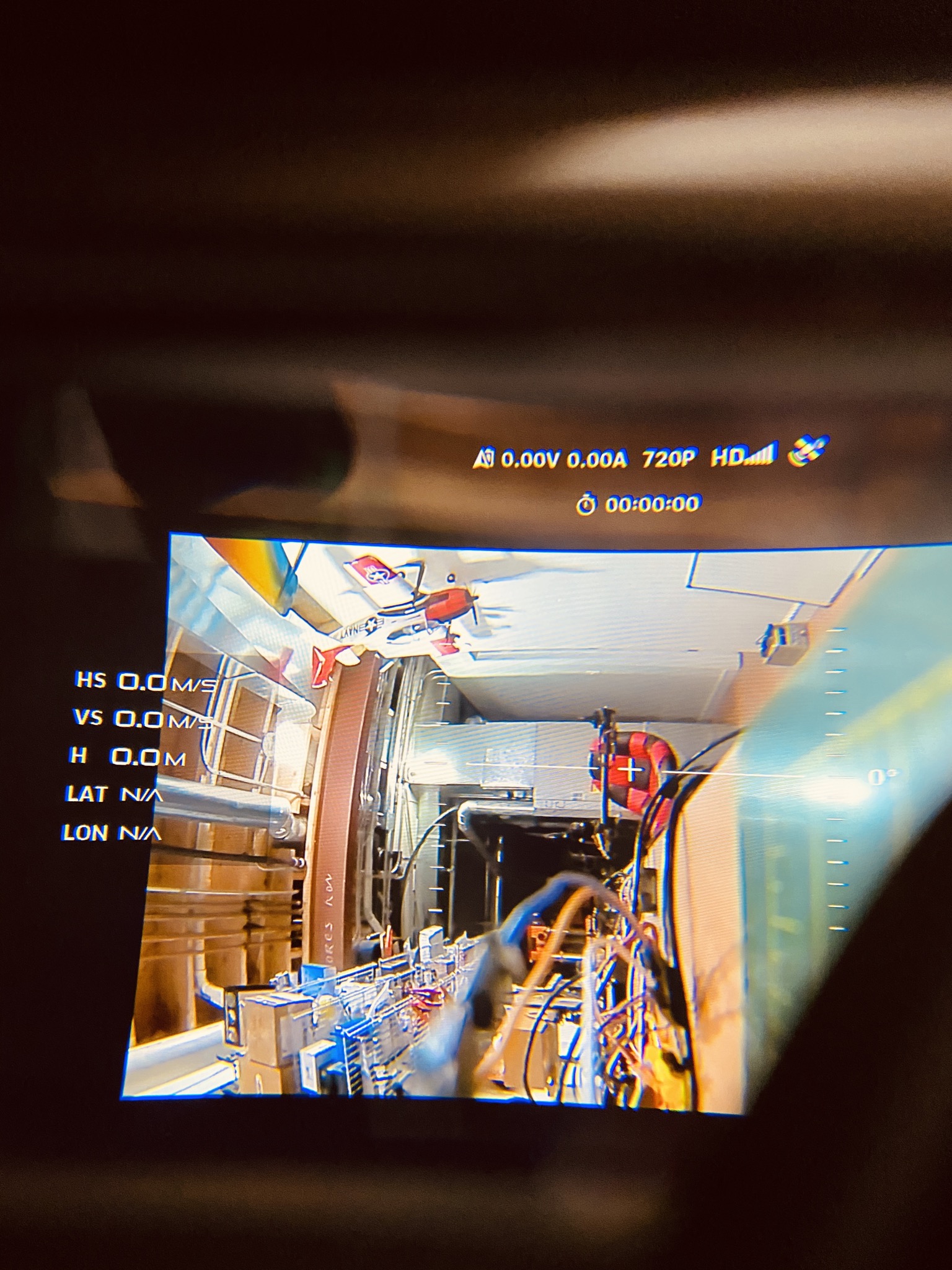
BUT the DJI Occuync latest firmware only gives you very small amount of data. This is all you get.
The Arduino code is for converting for the new DJI FPV ODD system specifically. The Ocusync Air system has native basic Mavlink Support.
The original Ocusync system does not have anywhere near the same level of OSD available and the Arduino will likely not work on it as it’s a different OSD comms
The New FPV system supports basic MSP osd and the new “custom” Betaflight OSD thst gives you all of the additional info.
You won’t get anymore on the old Ocusync System than what it shown as basic as it’s simply not got it.
I have been working on a video on this and it will go out this week showing how to setup.
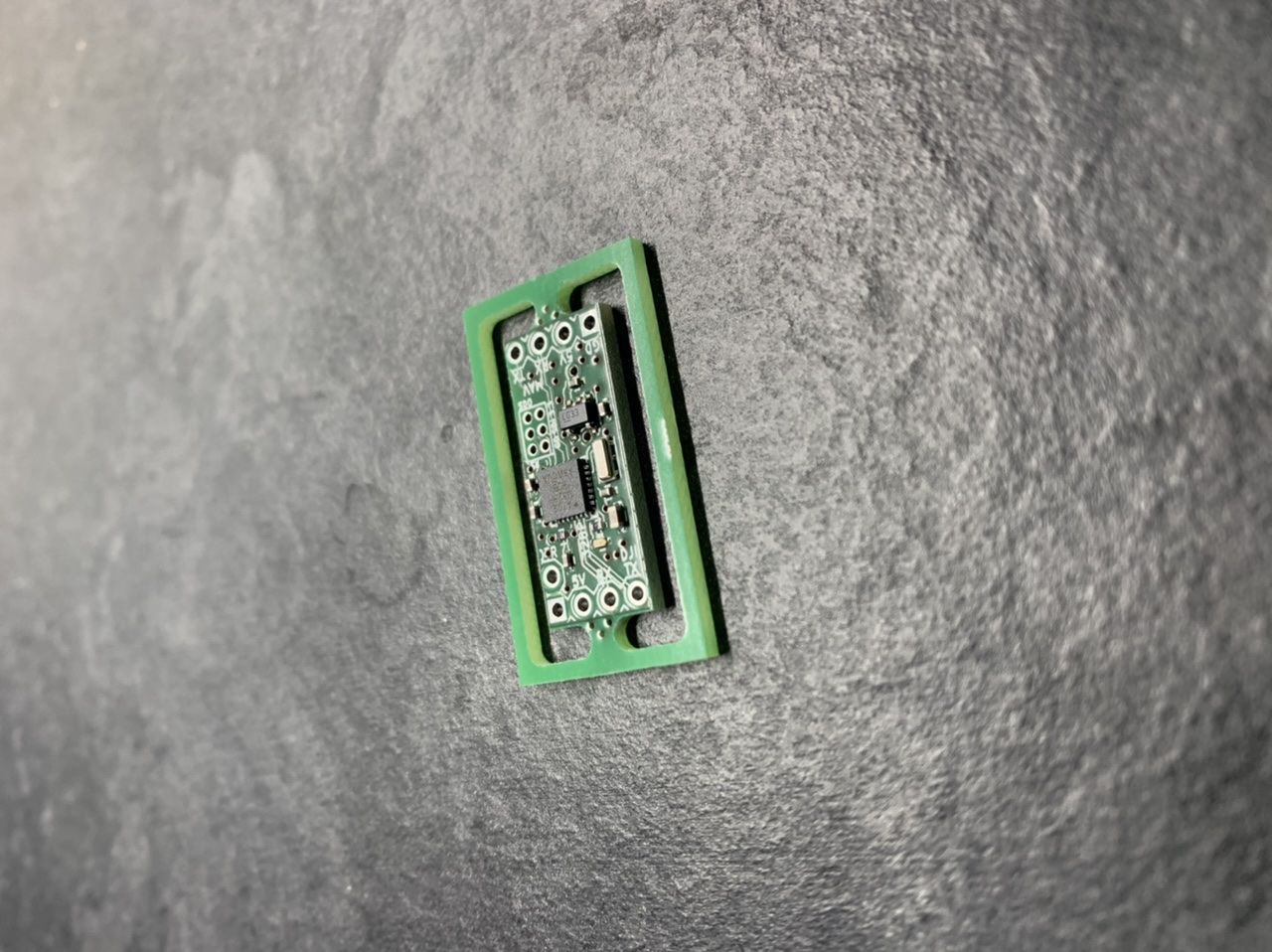
I made a little board specifically for the new dji to mav Arduino code and I can say it works really well with the DJI FPV Goggles loads of info distance to home, home arrow etc
No it’s Atmel 328p with Arduino bootloader so you can run the mav to msp… it loosely based on one I suppose…
Except it runs at 3.3 @ 8mhz which keeps the voltage to the correct levels Arduino runs at 5v dji spec says to keep uart at 3.3