pixhawk1 firmware does not working i this FC (already tried)! fmuv2 and fmuv3 is a good firmware
1
2
why then the copter accelerates?
If it’s a Pixhawk 2.4.8 you are wrong. Countless people have used Pixhawk1 on those FC’s; I did when I had a couple.
why is everyone posting fmuv2 and fmuv3?
Pixhawk1 is the correct firmware for that Flight Controller.
you writing here about fmuv3, i why when i load pixhawk1 firmware its does not work?
Pixhawk1 is the correct version for the Pixhawk 2.4.8. It includes Fmuv3 along with some other details.
Pixhawk1 Hwdef
Download the ardcucopter.apj file from here and use the “load custom firmware” option in Mission Planner to flash it.
Pixhawk1
Or suit yourself and don’t.
1 Like
ok, i will try this! thks!
If it doesn’t work use QGC and select Pixhawk1 as suggested in those other threads.
1 Like
1.Flashed the firmware pixhawk1 using QGC! It works! You were right!
2.I try to learn how to set up DNS filter! New DF log and imu batch sample is the same option? In MP i see only imu batch sample


Don’t worry about FFT and all that stuff yet.
You need to go back to the documentation and steps in MissionPlanner.
Start by setting up correct voltage (and current) monitoring then use the Initial Parameters section and accept everything it offers except the T-Motor Flame ESC bit.
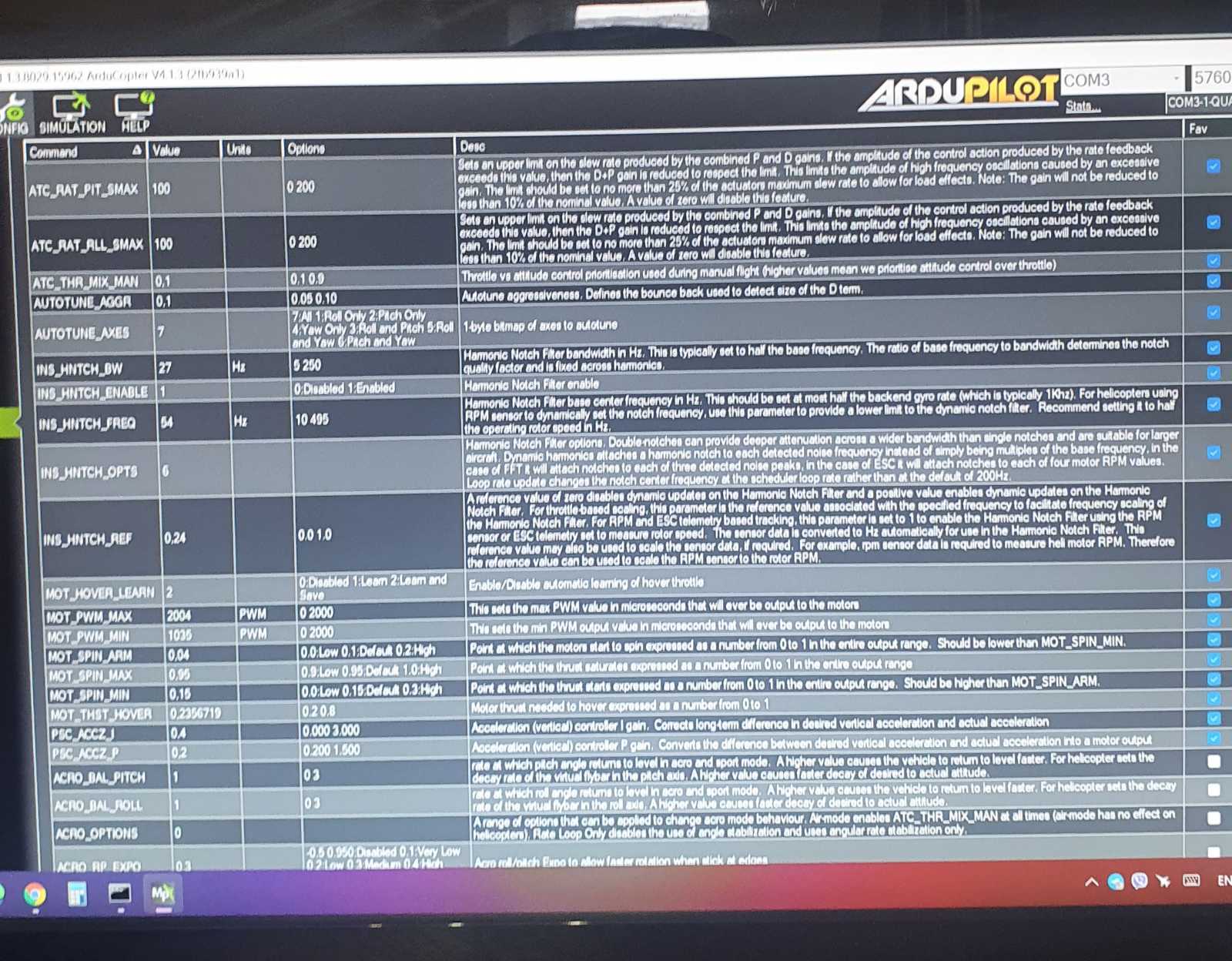
Set these to gather data for the Notch Filter configuration.
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
Hover for a while in ALT Hold mode and maybe a few gentle movements, nothing radical - let’s see that .bin log file and we can work through the next steps.
I did everything according to the instructions as you gave. firmware pixhawk 1, dns filter…pid look good? i dont see any oscelations/
when i try to turn on atotune i see messege - failing to level, pls tune manualy.
what can be?
log
Incorrectly. You have the Dynamic Notch Filter configured for throttle reference with no hover throttle value configured. And you have the INS_LOG_BAT_OPT still set to 0 so presumably you have not checked to see if the filter configuration is working.
Your Z vibration is still too high.
Ok, thks, i will check it
- I think i have found my mistake about Dynamic Notch Filter…
- what should I do to reduce vibrations along the axis Z or DNF will help with that?
- to see if the filter configuration is working i need to do ## Post Configuration Confirmation Flight and Post-Flight Analysis ?
- The Notch Filter is not a solution to bad vibes but if if they can’t be improved it will certainly help. Prop balance and FC mounting are the easy fix’s. If the frame is bad not much help for that.
- Right.
ok,thks,I will try tomorrow…
- I took another quadcopter, biger! 18 inc prof size.
- set up all settings
- i make autotune but pids are very, very bad, big oscillations…manual i can make a better pids
Disable the Static notch filter. The Dynamic Notch Filter will pick up the Harmonic of the 1st mode.
Then do so.
is everything else good now?