when the GPS signal is lost, in auto or loiter mode, the copter use FS_EKF_ACTION: EKF Failsafe Action and switches to althold mode and starts to accelerate. But it should smoothly stop, and then drift. Is the problem in the firmware or in the settings?
The same situation in the switching mode LAND
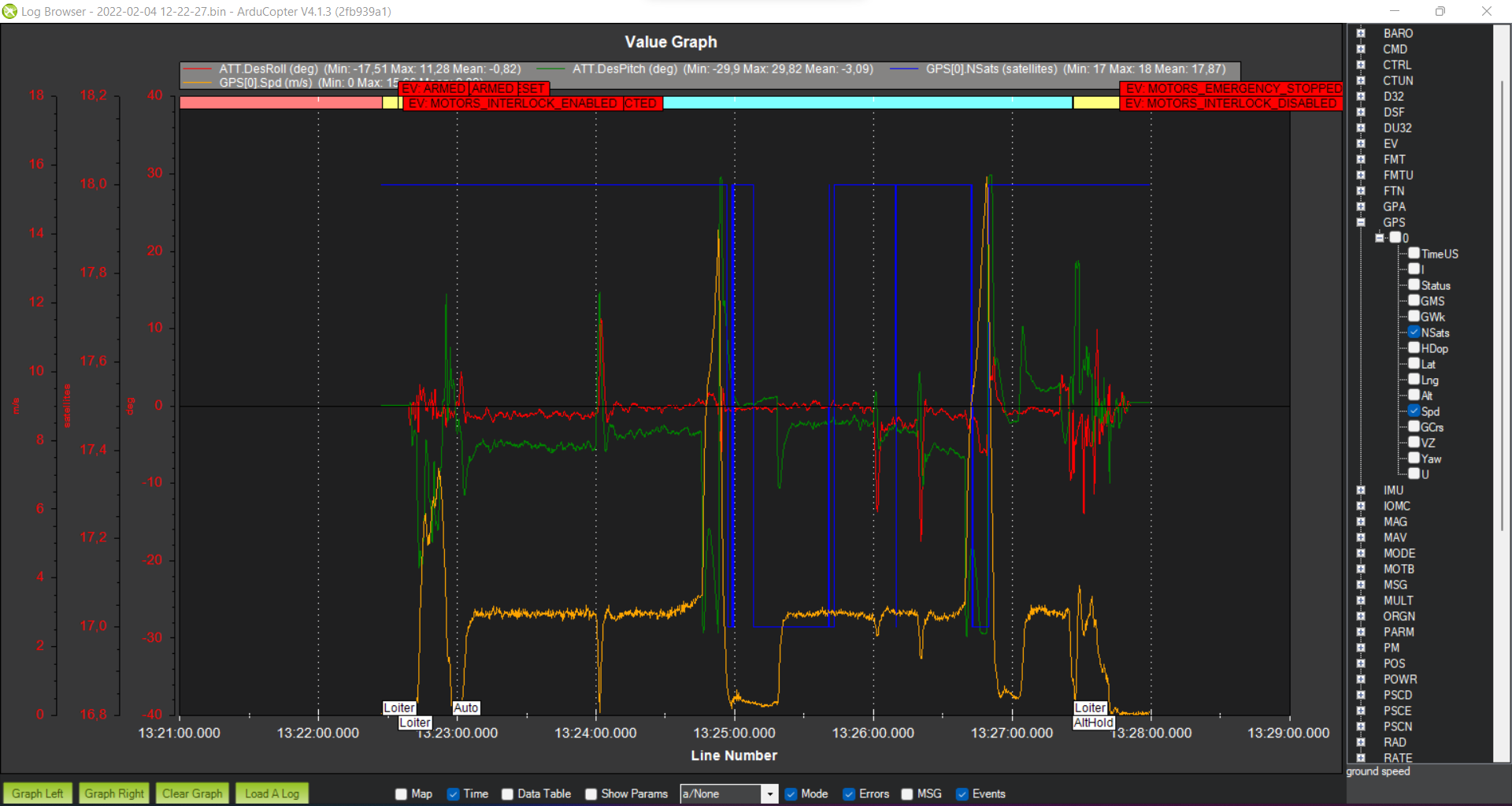
log here Log
If there is wind, it follow the wind,
If air is calm, you missed the trim settings…
air was calm, what trim settings do you mean?
https://ardupilot.org/copter/docs/autotrim.html#autotrim
Can help if your Accel calibration is not really level.
You misunderstood my problem! This behavior occurs only when the gps is lost! With the usual inclusion of the althold mode, everything is fine
Post a link to the .bin Flight Log not a Tlog.
it happens when copter use this option FS_EKF_ACTION: EKF Failsafe Action
i have only this log(
Why? The Flight Log is on the Flight Controller.
becose i delete when flash firmware((((
ohh find a .bin log
GPS Glitch>Vibration Compensation Failsafe and off it goes.
Read here when this FS is triggered and see for yourself in the logs where and how it happened:
Vibration Failsafe
You have a lot wrong here:
Update the firmware to latest Stable.
fmuv2 is likely not the firmware you want to run (what FC is it?)
You are on default parameters. You shouldn’t even make a maiden flight on defaults let alone an Auto Mission. Visit the Initial Parameter Setup Screen in Mission Planner and configure these parameters. After that configure the Dynamic Notch Filter, then run Auto Tune.
Your Z-vibrations are too high. Correct this before doing anything else.
1 Like
Thaks for help!
- FC is pixhawk 2.4.8
- Im use GPS jammer to make the F/S
- How to setup Dynamic Notch Filter?
- Yes in that test flight i dont set any PID…
- for that FC you should select pixhawk1
- No comment
- read the extensive documentation
- You need to properly tune the PIDs as per documentation, before you can start playing with GPS jammers
1 Like
pids and vibration are good now
i use FS_EKF_THRESH = 0 to disable the EKF failsafe.
when i turn off gps, by using comand GPS_Disable, in auto mode, it switches to althold mode and start flying fast, and do not brakes! Pls look at new log! i thinck its really firmware bag!
log
hello again, lok a new log pls…
hello again, lok a new log pls…
I have no idea what you are attempting to accomplish. I don’t see what you are describing and there is no bug.
You didn’t take the advice to use the proper firmware for that board and you didn’t set the Initial Tuning parameters. Good luck.
Thanks for looking into this @dkemxr
@vmv007 please do the following, before we can help you:
- you must upload
pixhawk1firmware version ArduCopter 4.1.3 or even better 4.1.4-rc1 - read the extensive documentation
- You need to properly tune the PIDs as per documentation