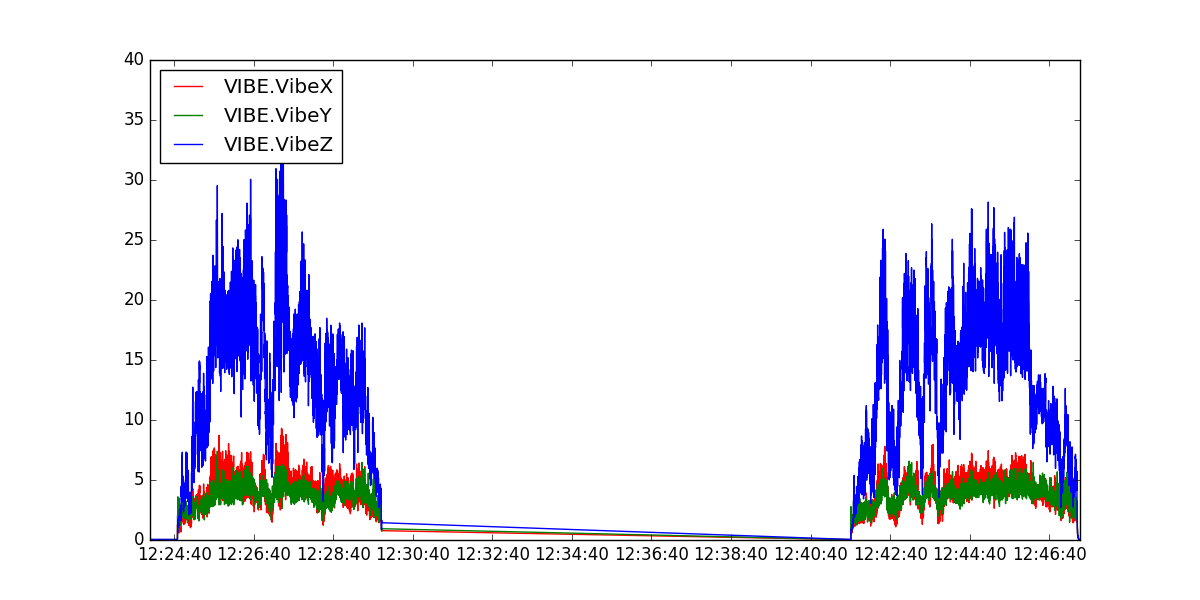
I’m flying a Tarot 650 frame with ArduCopter 3.4.6 (Pixhawk, 4114 300KV motors w/ 15 inch props). It flies reasonably well, but I’m trying to track down some vibration issues that are causing jitter in my videos. While VibeX and VibeY seem to be reasonable, based on the Measuring Vibration document, VibeZ is substantially larger.
Here is a graph of Vibe{X,Y,Z} from two recent AUTO mode flights:
One factor that is not talked about much is the aeroelasticity of your frame.
Think about your props moving forward while spinning, at any given moment you have a blade of your prop facing forward while the other faces back, so the forward facing blade has more lift than the back facing blade.
More speed equals greater difference between blades which equals twist.
If you think this might be the source then do a simple test.
On a still day do a hover for a few minutes then gradually increase your forward speed to as high as you can safely go.
Check the logs and look at your vibes from still to fast.
Do they increase?
All frames are different, and even similar frames can be vastly different due to the materials used.
For instance, a .5mm reduction in the tube thickness can increase torsional twist by orders of magnitude.
Even the same thickness tube but manufactured differently can differ greatly.
So look for twist, look for flex, look for anything that is loose.