Learn how to solder so you can get a perfectly good flight controller for a fraction of the price. Once you have that skill you’ll use it in many places. Especially if you want to create electronic projects. Matek flight controllers. F7/H7 are great, but if you’re on a budget don’t be afraid of the F405 controllers. They won’t have all the features but they fly just fine. M8 or M10 GPS modules will do the trick. I’ve been using various Matek F405 controllers with M8 GPS/compass modules for several years with post-secondary students, so I understand what a budget is all about.
Learn to solder.
Many of us here have fought with those old/crappy frames. They are nothing but frustration. Look for Hexsoon EDU-450 or Holybro X500V2 kits. They fly well and come with components that may not be the best but will get you in the air.
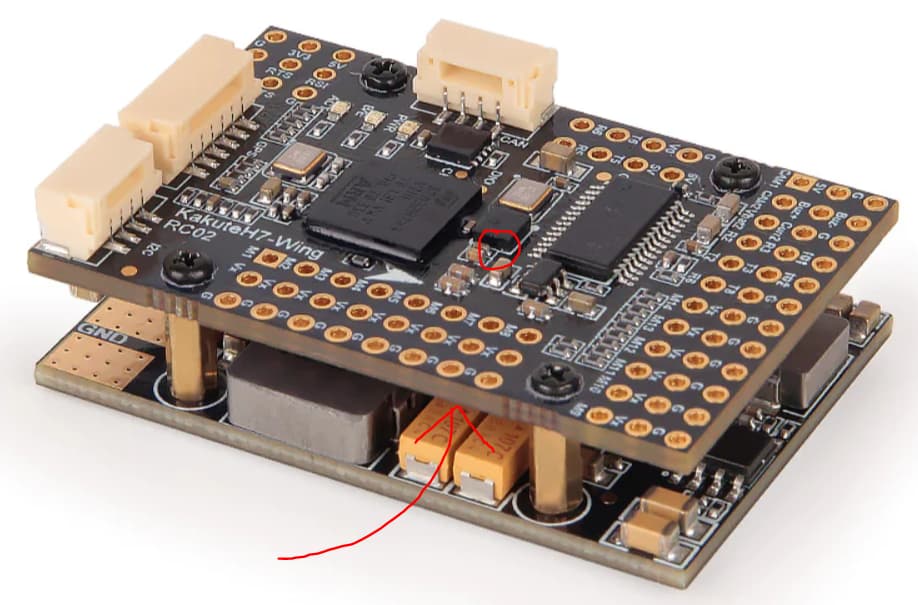
Listen. That Holybro Kakute H743 wing pre soldered pins FC, in this FC, there is no covering. So, barometer and sensor readings will be disturbed or not???..
Not. When the required piece of open cell foam is placed over the baro. Standard procedure, no issues.
Understand that large numbers of these flight controllers are used successfully on every type of Ardupilot craft. If you are looking for excuses to not use one you are running out of options.
Actually, I am ashamed, but lately I researched and understood that this Kakute will be a great option for me. Also, if anybody has practically used, can anybody tell if there is a MAJOR difference between M9N and M9N MINI GPS systems? Because that Kakute supports only mini GPS. Also, which Power module should I use with this Kakute?? There is no PM included in package!
Sigh…
Any GPS module will work. Buy an M10
You don’t need a power module it will accept full battery voltage directly. Did you at least read the spec?
Have you read any reference material we have suggested?
Oh yes. I have read all given on holybro website and also compared both GPS. Then I am asking any practical answers here.
Also, I am reading documentation on ardupilot website.
‘Sigh…’
Offtopics: are you people awake all night??!!
On Holybro page is not said that only this GPS is supported. It is just a optional bundle to be sold. But you can just buy the FC there and a totally different GPs from another manufacturer if you wish.
Oh yes. I will prefer M10 original…
Actually, these things are already expensive for me and added is the 5000Rs delivery charges… Kakute will be fairly good for me, if it even does not requires PM. But, without PM, how will it monitor the voltage and current?? Or is there any built in PM in Kakute??
As I thought you have a existing drone with a GPS. So if all is really expensive for you why you want now to buy everything new. You also can use in a first step your existing GPS.
Actually that old GPS is Ublox M7N GPS and it is not that accurate. It only connects 8 satellites and shows 3 metre errors. That’s why I am not going with that. I am also thinking to change my frame to a 450mm frame as it has lots of vibrations. I am also planning to add a Hawkeye Firefly Q6 camera to that drone and after 8~9 months, I will also use skydroid T10 transmitter and receiver, which is excellent. And offcourse FC will be changed to Kakute… So it’s just building a new drone…
That camera looks like junk and would still require a digital video transmitter and receiver. Recommend you skip the cameras for now and just get something flying.
The remainder of your questions are easily answered in the documentation that you continue to ignore.
Actually, I am already into air. I have already watched many videos but there is no port on Kakute to connect telemetry. And why would you think that camera is junk! Yes off course it would require a video transmitter and receiver, which Is already there in skydroid T10 receiver and transmitter! Why are you always in a Rage!
Ok. So I found that my apm barometer was not having that open cell foam covering. And it will never work properly with the foams that I am putting over the barometer. Now what can I do? Is there any alternative to the foam thing?? I will definitely change my FC by the month after the next month. But still, is there any hope for my apm 2.8 barometer?
@RudrakshTek I don’t know what you read ant what videos you are looking.
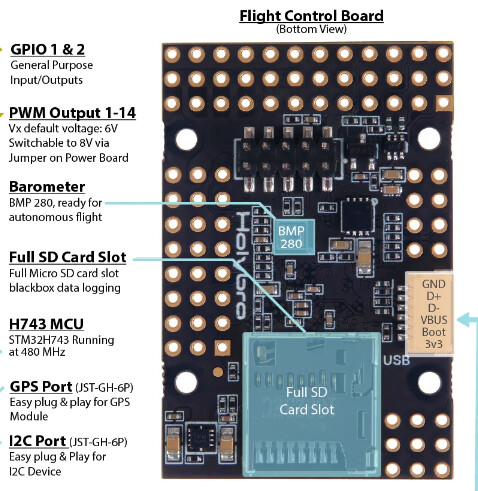
Within 30 sec I found this informationon Ardupilot pageabout the Kakute H743 Wing:
The UARTs are marked Rn and Tn in the above pinouts. The Rn pin is the receive pin for UARTn. The Tn pin is the transmit pin for UARTn.
SERIAL1 → UART7 (TELEM1) (DMA enabled) with CTS/RTS
SERIAL2 → UART2 (TELEM2) (DMA enabled)
I tried somewhat like this.
I found that my barometer works correctly and the problem is actually of air pressure.
This Is what actually happened:
So I placed my drone on ground and readings were 0.20M. when I armed my drone, the readings became 0M and then gradually became negative with -0.1, -0.30 and went till -1.30M. my Quadcopter was armed at this time.
When After arming, I raised the throttle up in stabilize mode, the readings had great fluctuations, sometimes highly positive and sometimes negative. After this, I disconnected it from my PC and flew it in loiter mode. My drone was skyrocketing sometimes and sometimes coming down and striking the ground. This means that the altitude was not at all steady. After which I used a piece of black foam over barometer sandwiched in the case. After which, it stopped skyrocketing and maintained a fix altitude(though it was still moving up and down a little) and it was quite unstable even when 8 satellites were connected! When I performed RTL, it ran up 11M height as set by me and, instead of coming at home place, it flew in one direction and landed on the roof of another house!!!
However, with this, I am pretty sure that as the motors spin, the air pressure fluctuates in the case and which results in such readings. I think of covering it with an even better foam…
Also, when the motors were not spinning, I tried an height test. I placed my drone at ground with altitude 0.20M readings. I lifted up my drone with hand and placed it at 1M height. The readings were 1.21M approx. On placing it at 2M, the readings were 2.20M approx.
Don’t you think after reading all this that my barometer is OK? The problem definitely comes when motors are spinning…!?
And what if that open cell piece of foam slides off even from Kakute after sometime? What will I do in that case?
I agree to that. A 1.3m height difference means is a difference in air preassure of around 15 Pa, or 0.00015 bar (or 0.0022 psi in freedom units). That is not much.
Also that sounds like the foam did an excellent job of damping air movements around the baro
What exactly do mean with “unstable”? Like “twitchy” or more like “flies around a lot despite loiter”?
That it flew away usually isn’t caused by the baro and, since you are in an area with houses around you, GPS reception probably isn’t the best.
You have to secure it of course! Since the baro is on the underside of the top pcb (see pictures), therefore between the pcbs, you can squeeze it so it holds itself. You can also tape it to the pcb if you want extra security and you use temp-proof tape, like Kapton. As with most of problems: be creative, you’ll find a solution. (don’t try to screw it to the pcb though)
Ok. So with unstable, I mean, if I take it to 6M of height, and in loiter mode, if I leave the RC still, drone automatically changed its pointing direction, moving slightly up and down, going in many directions automatically. However, it was flying like a dream when the barometer was OK.
Yes, That foam did an excellent job. So I am trying to cut that foam in a good shape, and trying to rightly place it over barometer, so the lights are also blocked. And will soon share the results. I think, only foam can treat the barometer.
And also, I somewhere read that a buzzer can cause errors in Accelerometer. I am having a buzzer in my drone which beeps 5 times when altitude goes negative while in air. Should I remove that buzzer?