Everything arrived!
In the past week I’ve developed my first flight mode in the simulator. Now it’s time to dive into the hardware!
Everything arrived!
In the past week I’ve developed my first flight mode in the simulator. Now it’s time to dive into the hardware!
Nice. Now the fun begins! Building these craft is almost as much fun as flying. For me anyway.
I think I painted with too broad a brush saying that default parameters “rarely fly well if at all”. This applies more to Multirotors than Planes. Indeed, my 1st Plane build (a wing) did fly OK on defaults so you are right.
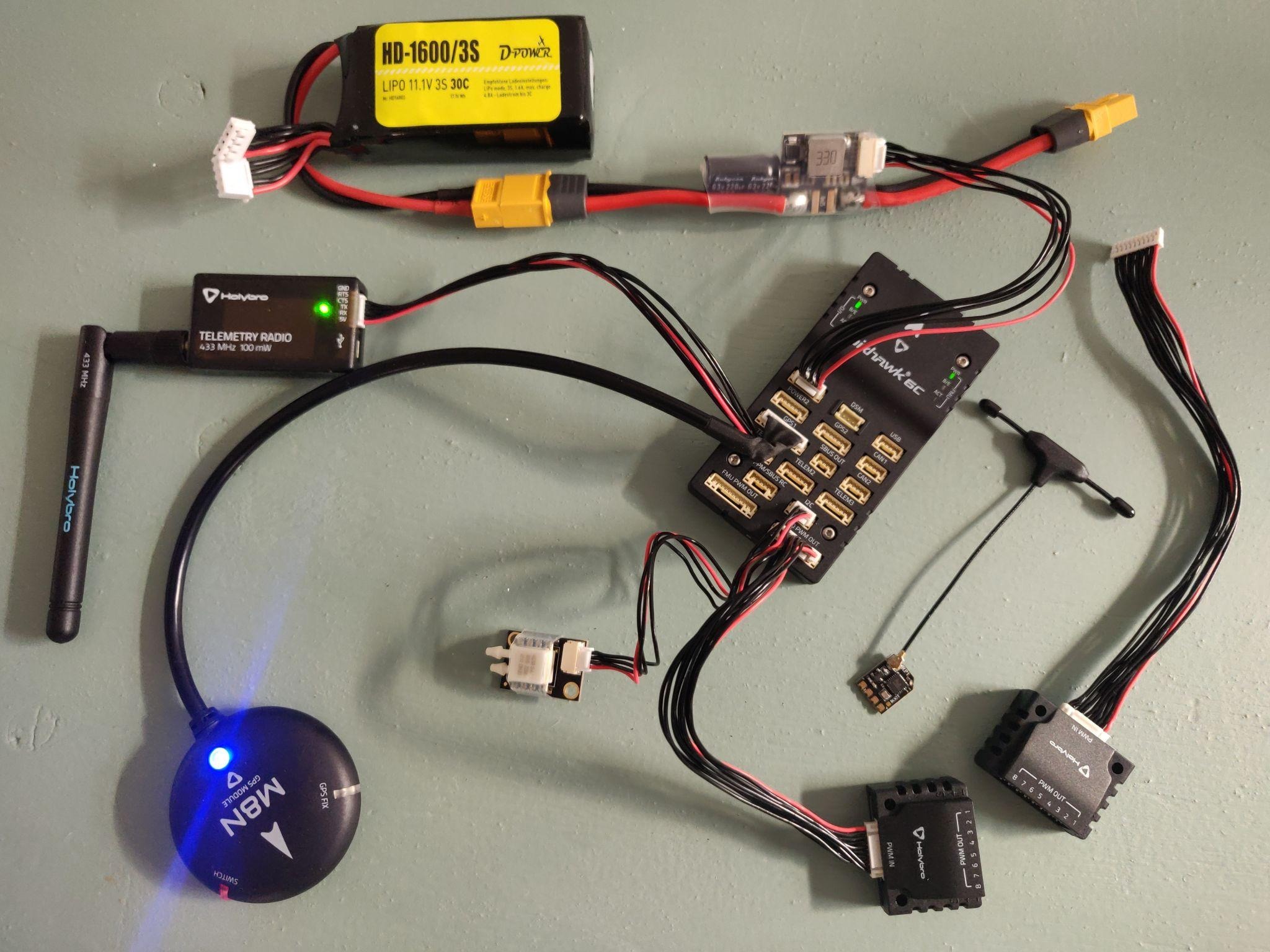
So I’ve been connecting the electronics together, this is what I’ve got right now:
I’ve got two questions:
The receiver
The receiver has no wires, so I need to solder the wires on. But which connector on the Pixhawk do I need to connect it to?
PWM and servo/motor power
On the pixhawk there are two PWM connections: FMU PWM OUT and I/O PWM OUT. In the docs I read this:
If using a plane or rover, the FMU PWM-OUT will need to be separately powered in order to drive servos for rudders, elevons etc. This can be done by connecting the 8 pin power (+) rail of the FMU PWM-OUT to a voltage regulator (for example, a BEC equipped ESC or a standalone 5V BEC or a 2S LiPo battery).
So do I understand it correctly that I need to split the battery XT60 connector (in the picture on the top right) to the ESC and to the FMU PWM-OUT? So I guess I need splitter and a new wire which goes from XT60 to one that fits the FMU PWM-OUT in the pixhawk? And then connect the pwm connectors of the ESC and the servo’s to the little PWM block which is connected to the I/O PWM OUT?
It doesn’t really make sense to me. If FMU PWM-OUT just needs power, why is it called “pwm out”? And why does it come with two of these little pwm blocks (in the picture on the bottom right)? I think I’m totally misunderstanding how this should be wired.
Could anybody smarter than me give me some tips on the PWM/power and on the receiver connection?
The pwm out does supply the pwm signal (1000-2000us at 50Hz or more. But that signal wire is only good for about 25mA so if you want to drive any servos you need a 5v (or 6 or 7.2) decent supply to the centre rail of the servo headers. We normlly just use the esc 5v out if it has one or an independent bec otherwise
The reciever goes to any full uart, use both the tx and rx pair, chop one of the spare cables and replace the discarded plug with your rx remembering to connect tx to rx and rx to tx