This morning I ran two 20 minute flights of my recently built Quadcopter in an attempt to complete an autotune, but without success. Each 20 minute flight was configured to run autotune just for the roll axis.
Now I am trying to understand what the log data means from those flights and to try to figure out why autotune has been unsuccessful. According to the documentation, this is the data that is collected:
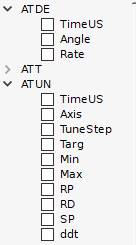
Which seems to be a little out of date, as this is what is available in MissionPlanner to analyse:
I have spent hours pouring over that data but have not been able to find any clues as to what might be preventing my Quadcopter from completing an autotune.
I would be very grateful if someone could take a look at the ATDE and ATUN data in that file and advise me what it means and why the autotune does not complete. I don’t understand what the data really means and what the messages about the autotune progress actually mean. There is a message about evey 2 seconds for the entire 20 minutes!
Hi @hosein_gh,
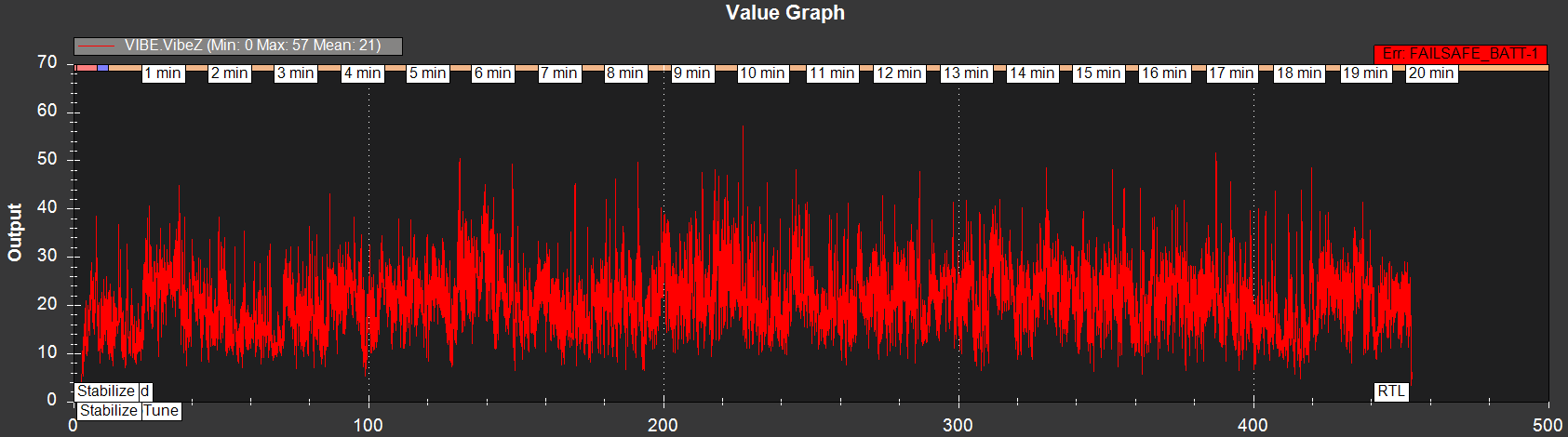
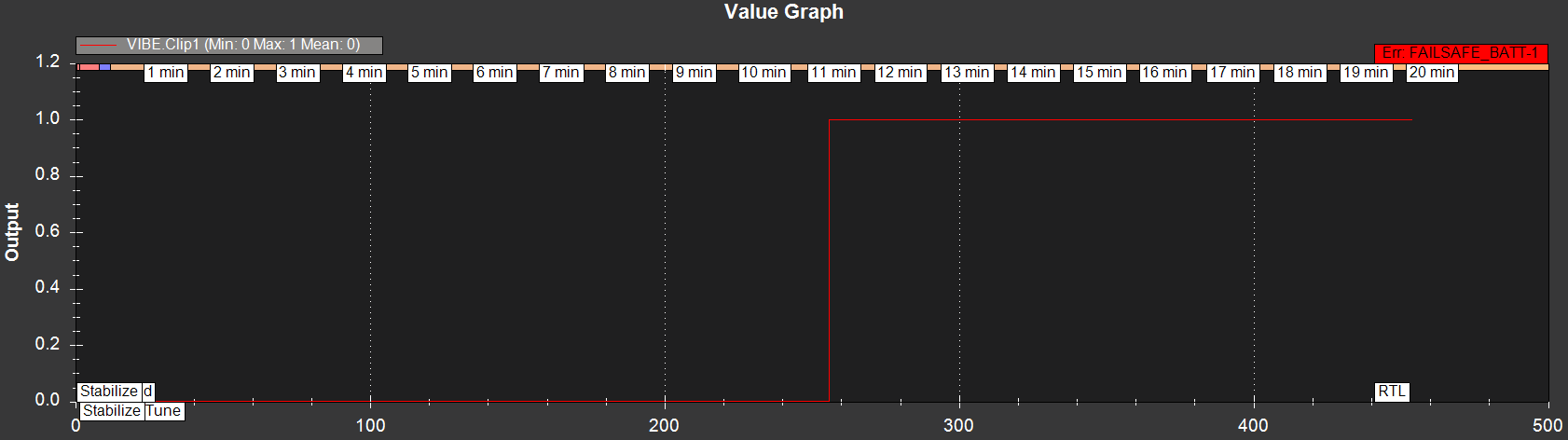
Yes, I was thinking that the Z-vibration levels may be a factor, so I am going to try some “fixes” today, weather permitting. However, the information here suggests that “vibration levels below 30m/s/s are normally acceptable. Levels above 30m/s/s may have problems” The Z-vibration in my quad has a mean of 21 and a max of 57.
Yes, I followed those tuning instructions precisely …
I would still like to know what the ATDE and ATUN data in the log file really mean though, as it might give a better clue as to what is going on with Autotune?
as described in document “Maximum acceptable values appear to be below 30m/s/s.” not average, your max is 57.
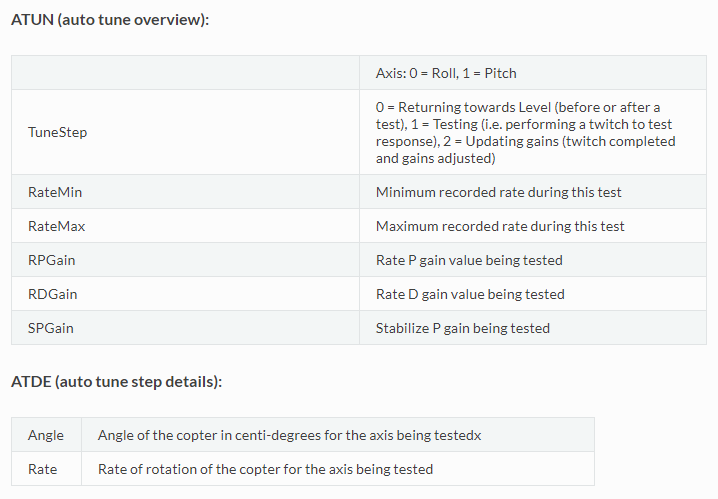
about this question i found this information on github ATUN (auto tune overview):
Axis: 0 = Roll, 1 = Pitch
TuneStep
0 = Returning towards Level (before or after a test), 1 = Testing (i.e. performing a twitch to test response), 2 = Updating gains (twitch completed and gains adjusted)
RateMin
Minimum recorded rate during this test
RateMax
Maximum recorded rate during this test
RPGain
Rate P gain value being tested
RDGain
Rate D gain value being tested
SPGain
Stabilize P gain being tested
ATDE (auto tune step details):
Angle
Angle of the copter in centi-degrees for the axis being testedx
Rate
Rate of rotation of the copter for the axis being tested