So, i have a bit of a new issue to solve - just tried out new props on the 7" model, replaced 6" gate breakers with 7" Cyclone T7056C, to increase efficiency and boost loiter time.
It is behaving acceptably, shows more vibrations, as expected, but flies ok. only issue i see now is that in both pos hold and alt hold mode when given command to descent with a stick down, it is very sluggish. i am not sure if it is overpowered to that level, i do not think so, but it wobbles a lot on the way down and descents very slow. with 6" props it was a smooth nice down movement, here it was a bit problematic to even get it down, like if it did not want to go.
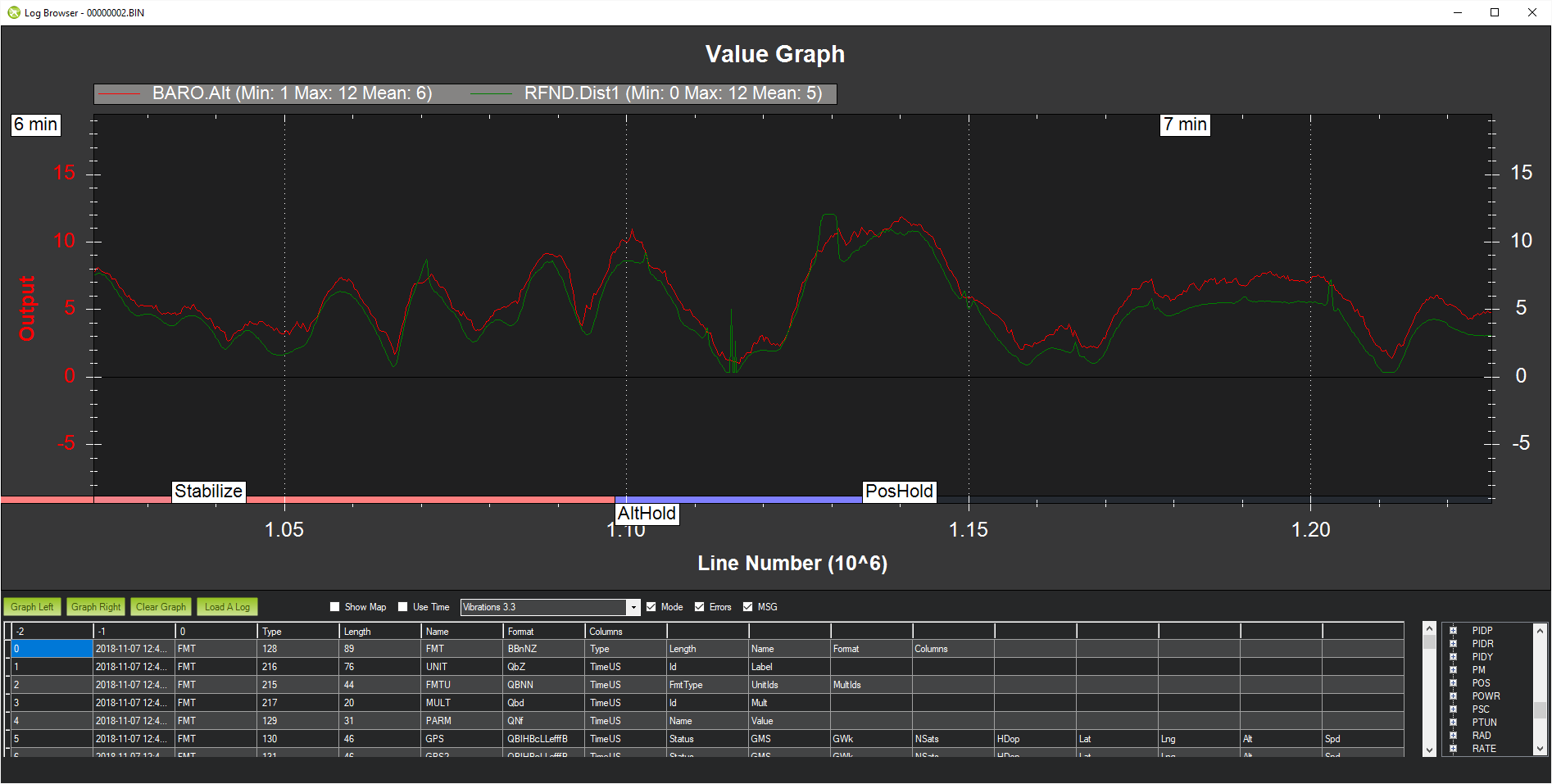
in stabilize mode it was descending ok. so, not sure, will try to look but if anybody knows how to tune that specific part - here is a log segment where issue was replicated - first a stab mode with good descent, and then alt mode with sluggish descent.
i will look at it in the evening after work, any advice is appreciated.
There is a descent speed parameter that alt_hold and all the other auto modes use.
So, Stabilize will definitely let it fall from the sky faster. I’m not at home now and can’t look up the parameter, but if you search the parameters for speed or spd, I think it will show up… Or search for “down”… It’s called something about speed down.
But, changing props shouldn’t change the speed it descends in auto modes due to that parameter, so maybe that’s not your issue…
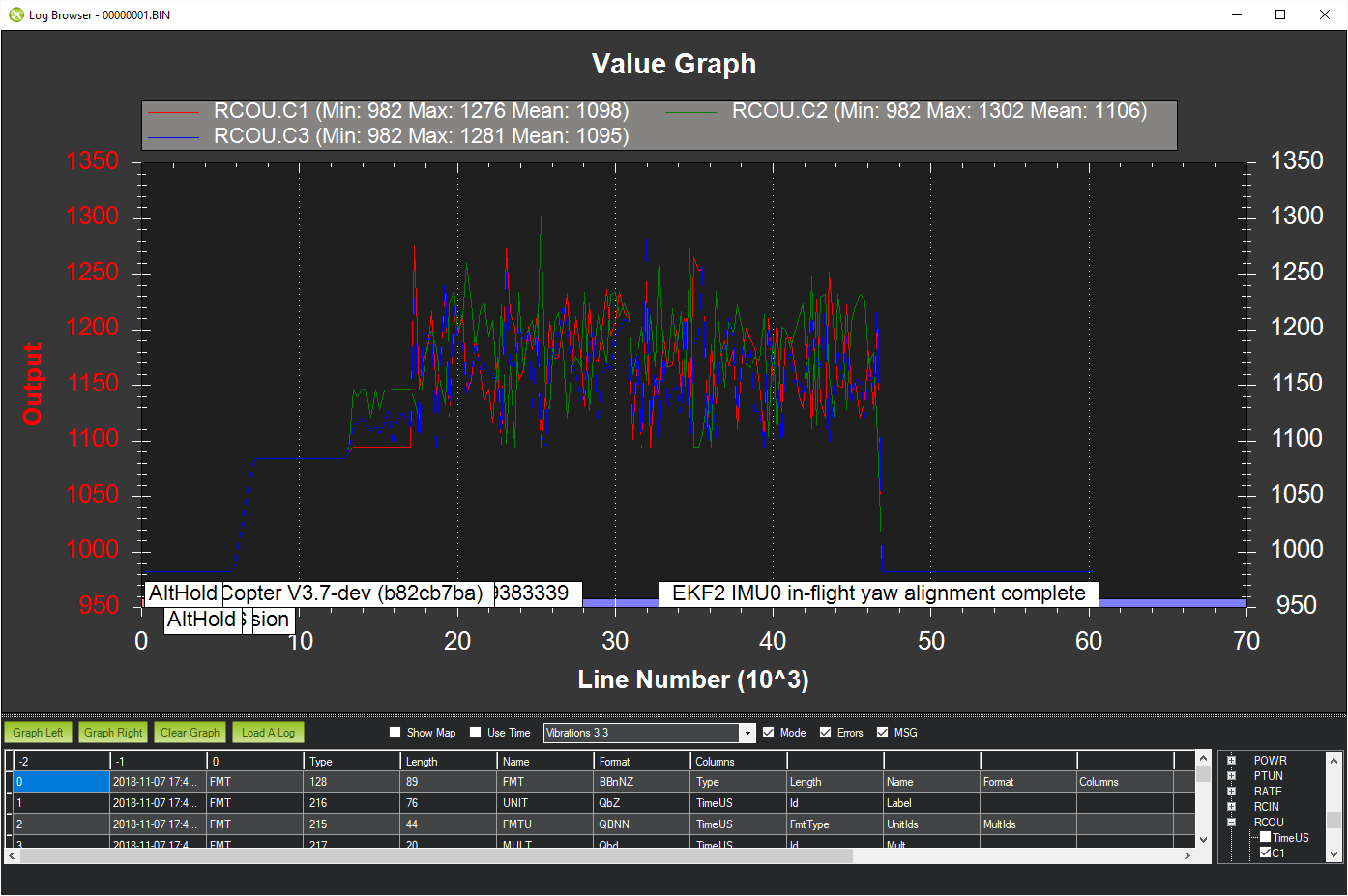
Here, you can see that the drone is not achieving the target climb rate, and your motors are at minimum throttle. Basically what’s happening is that the attitude controller is saturating the altitude controller; it’s the opposite problem I explained in this thread, if you want more information.
There’s a few things you can do.
Lower MOT_SPIN_MIN. It needs to be greater or equal to MOT_SPIN_ARM, but you can lower that also, it just needs to be high enough that your motors spin up reliably when arming. This will increase the throttle range on the bottom end.
Lower ATC_MOT_THR_MIX_MAX. This parameter decides the priority of attitude vs. altitude control when they can’t both be controlled perfectly. It is rare to need to lower this, but you may find it acceptable.
Change powertrain or increase (battery) weight. If the above software changes aren’t enough, you might just need to change hardware. Increasing battery weight is a not-terrible way of doing this without killing your flight time.
it is already dark outside, could not see it properly, but i think it fixed the issue, lowering mot_spin_min from 0.15 to 0.11. i think it lowered down ok now.
i agree this model asks for 2200mah batteries but i have too many 1500mah and it is more than 10min loiter now with 1500mah, so, i am hesitant to buy more lipos.