Hi, everyone! This has happened once before (with a different drone), but it happened again today, and clearly my previous attempts to fix it did not work.
Essentially, I was flying an auto mission with a target velocity of 5 m/s, when it just shot upwards, and nothing I did could stop it. Eventually it stopped, and although I briefly was in control again, it ended up free falling into the ground from 115 meters.
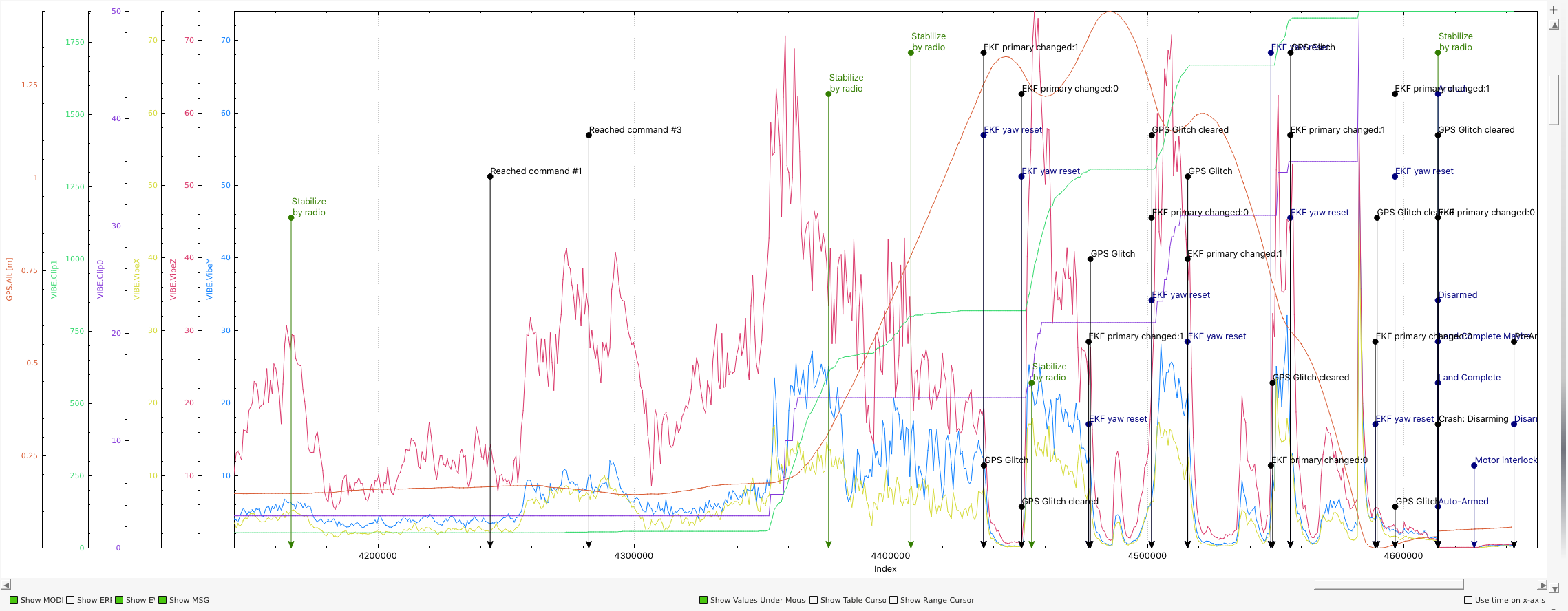
I can’t find anything in the logs that could cause that. I’ve checked for GPS glitches (they only occur after it begins its rapid ascent), abnormal voltage/current readings (I was wondering if the Pixhawk lost power?), and everything else I can think of, but nothing seems to be at fault.
The only correlation I could find was that the pitch was deeper than at any other point in the flight, right when the drone took off, but it was only -29 degrees. With my other two (nearly identical drones), I’ve reached angles of up to -40 degrees without issues. On the previous crash, the drone dipped to -41 degrees right when it took off upwards. On the other hand, it reached +47 degrees without problems.
Does anyone have any ideas as to why this happened? Here’s a link to the log:
Thanks in advance!