I am using a 4in1 esc running bluejay firmware with Xing 1504 3100kv motors. During motor tests when done individually all motors spin with at 10% throttle and even in motor sequence test all motors do spin but when I do test all motors only 2 motors spin.
I changed the MOT_SPIN_ARM = 0.2 and MOT_SPIN_MIN = 0.25 and tried to arm even then situation is same only 2 or 1 motor spins and remaining don’t. I tested this with and without propellers on a bench.
do I need to change any other parameters to rectify this issue?
Any help from the community is much appreciated!
Update to Copter 4.5.3 and upload your parameter file.
What ESC protocol are you using?
I am using copter 4.5.3 only. ESC has Bluejay I tried with dShot 300,600 and PWM. In all I am seeing similar behavior.
june8_param.param (21.5 KB)
What Flight Controller? Flash the Bdshot version of firmware and use Dshot600.
Have you try to find out these motors pwm range? MOT_PWM_MAX,2000
MOT_PWM_MIN,1000
MOT_PWM_TYPE,8 (PWMRange) is not ds300, 600 or normal analog PWM. You must make sure with the ESC manufacturer what is supported, and any configuration needed, like jumper for example.
By the way, your MOT_THST_EXPO,0.2, are you sure? What is your propeller dimension?
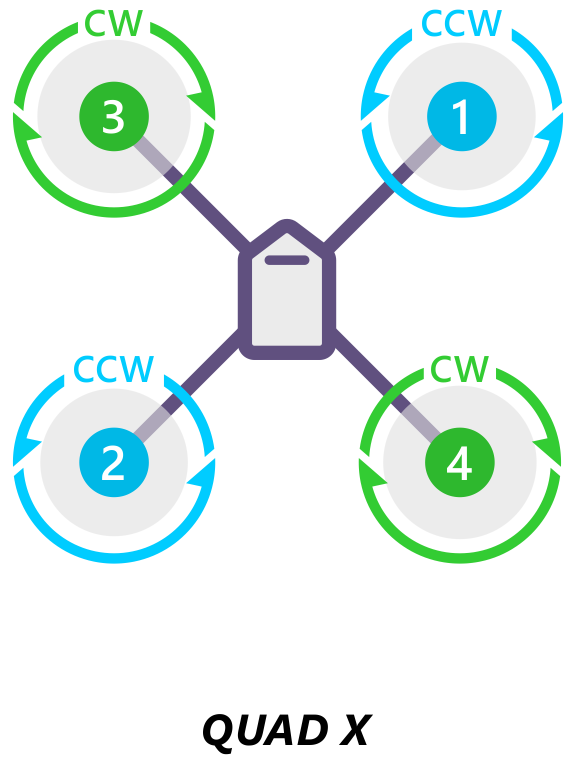
FRAME_CLASS,1
FRAME_TYPE,1
SERVO1_FUNCTION,36
Something is not correct.
I am using MatekH743 mini.
I did flash the Bdshot apj file also and tried these params.
June8_bd_param.param (21.4 KB)
even then I faced same problem.
In tuning page I am getting ch1out, ch2out, ch3out & ch4out but in escrpm I am only getting 1,2,3 but the rpm is zero for 4 (here that particular motor 4 was not spinning)
Set these:
SERVO_BLH_MASK,0
SERVO_BLH_OTYPE,0
servo1_functions are different because I am using a 4in1 esc and its orientation changed a little so based on which motor is spinning I changed the servo*_Function param
Nothing wrong with re-factoring the motor outputs to set proper order.
Ok I just now tried these params, but I am still facing the same issue there is no escrpm data for 1 particular motor but there is chout data for that one.
But that motor spins correctly in motor test tab.
june8_bd2.param (21.4 KB)
Sorry i didnt understand did i do something wrong is changing servo*_function param
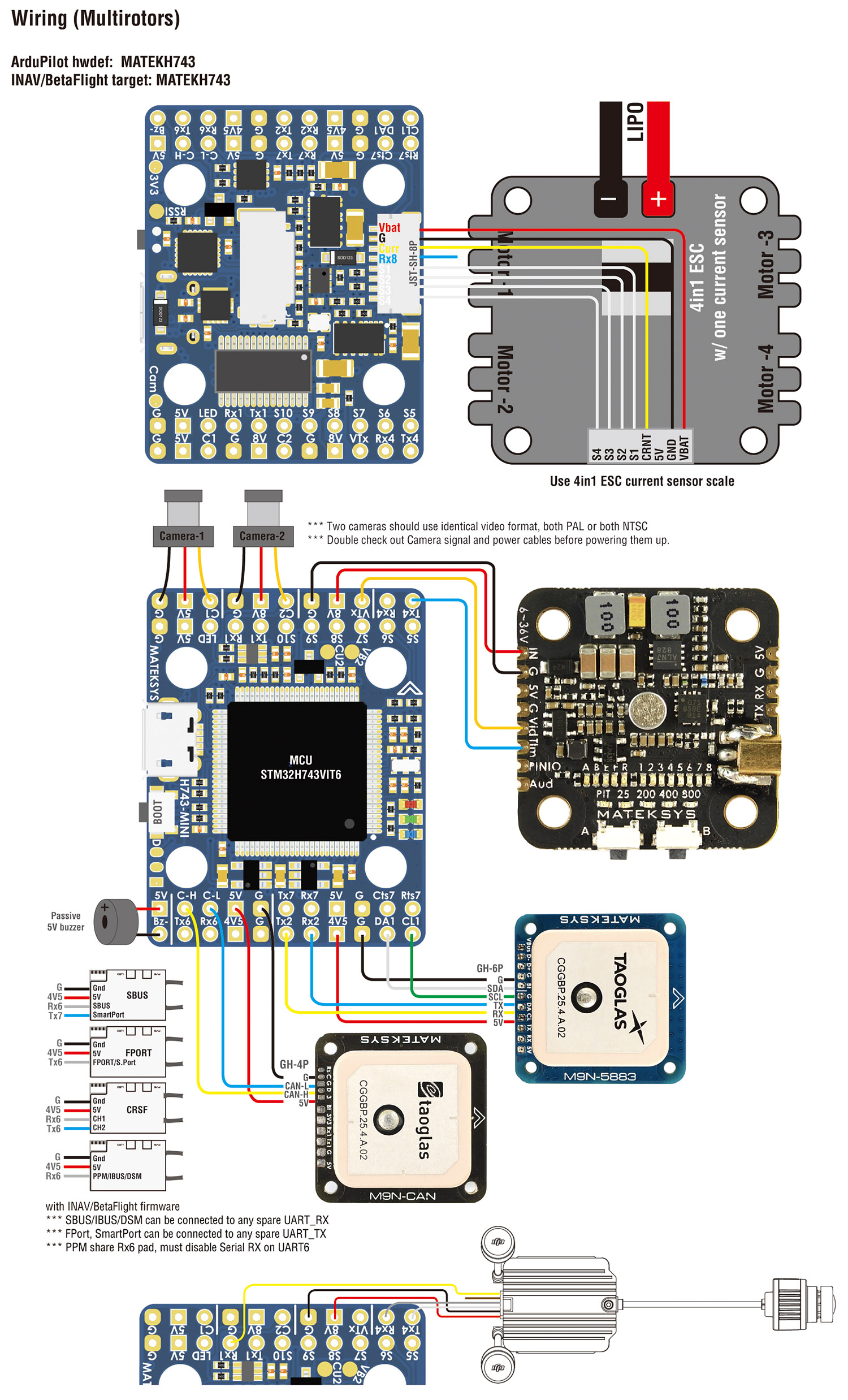
Are you referencing this wiring diagram?
If yes, your S1 (M1) should map to servo3/1 (35), S3 (M3) map to servo 1/3, 33, am I wrong?
{kind=link}
{kind=link}
No, you can re-factor the outputs anyway that’s required such that they run in the right order in Motor Test. Manufacturers don’t adhere to a standard and users can orient the ESC anyway they want sometimes requiring a change from the defined orders.
1 Like
yeah but it depends on how your motors are spinning my logic was to change it in params to get correct order of motor rotation in motor sequence test if i am not getting it i just change the servo_function param accordingly.
Yeah so I can confirm that with the params I posted my motors are spining in order in correct direction in motor sequence test. since here only 1 motor spins at one time all motors are spinning correctly.
but the moment i do test all motors 1 motor stops.
Hope you really get it correctly.
I can confirm you on that part, but even if I am wrong in getting my motor nos., it shouldn’t be a problem to getting all motors spinning at once instead of each spinning when tested independently.
1 Like
MOT_PWM_TYPE,8 (PWMRange), maybe this is not supported by the ESC and /or MOT_PWM_MAX,2000
MOT_PWM_MIN,1000, SERVO_BLH_MASK are not set correctly.
Sorry I was out on a vacation so couldn’t work on this much but i did try all these and i am not able to find the reasons when i use a higher kv motors I didn’t found this issue maybe it might be somehow related to me running it with only 2s whereas the motors are rated for 4s
hmmm,
Input Volts: 3~6 S
Ha will try to do a bench setup and get a conclusion on this.
But had a general question if instead of a bdshot capable ESC if i am using a normal blheli_s esc should i use the same bdshot capable firmware or normal one. And how does bdshot firmware effect the normal firmware?
like if i use a bdshot firmware without bdshot esc what will be the effects
My knowledge is there are “analog” and digital ESC.
Analog ESC needs calibration with flight controller.
Digital (DShot) ESC does not need calibration.
They are different in ESC protocol.