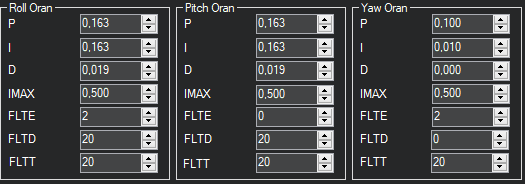
I would suggest starting over at default parameters + Initial Setup parameters. These are too low:
ATC_ANG_PIT_P,3
ATC_ANG_RLL_P,3
D term is likely too high.
P&I may be too high.
The Dynamic Notch Filter is not configured.
So from default set the Rate Pitch and Roll P&I terms to something like .1 leave D as default. Set these as per the Tuning guide based on MOT_THST_HOVER:
PSC_ACCZ_I
PSC_ACCZ_P
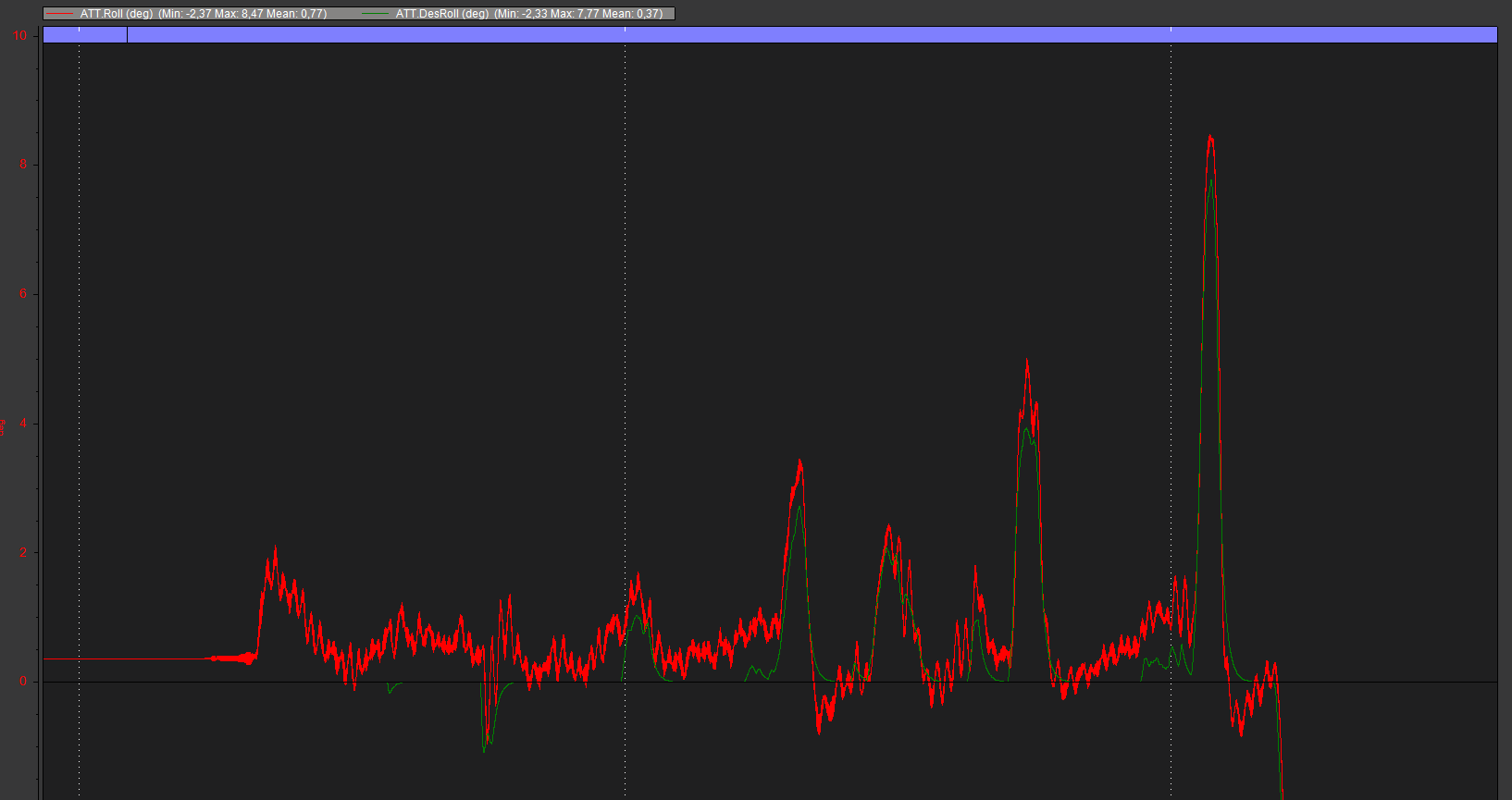
Configure to collect data for the Notch Filter and make a hover flight in AltHold and check for output and rate oscillation. If present lower the Rate P&I values more and try again. When the oscillation is gone configure the Notch Filter and run Auto Tune.
Everything Dave says is perfectly true. There’s a lot to unpack in those statements though, so read through the docs and tuning guides very closely.
Make adjustments to fix one issue at a time, do a test flight and check logs to see if you made it better or worse.
Ask more questions here
Oh, and better describe your aircraft: motors, props, ESCs, frame, battery…
Thanks for answers. I have 10x45 props, t-motor 2814 1200kv and 4 cell lipo battery. So I alredy read the docs but I really can’t understand how to configure notch filter. Is there a video or an other doc about it?
Ok for Harmonic Notch filter there’s plenty of docs and examples in the forum, but here’s the condensed form, assuming you dont have ESC/BLHELI telemetry:
HNOTCH phase 2
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF, hover_thrust
INS_HNTCH_FREQ, peak freq from FFT
INS_HNTCH_BW, peak_freq / 2
INS_HNTCH_ATT,40
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,2