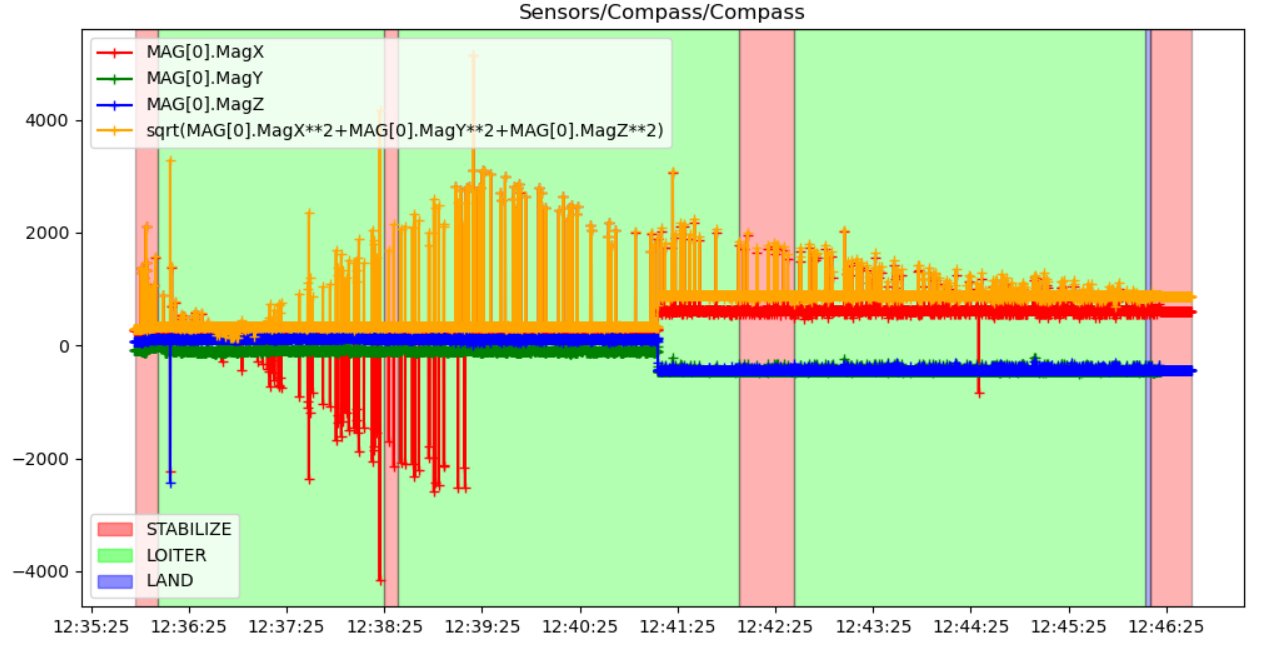
Today, while Flying in Loiter mode, The Quadcopter has deviated from the locked position significantly and there was also yaw drift upto 180 degrees, I had to take control manually from the loiter mode.
This never happened before.
If the compass is toast, then i should be seeing yaw drifts right from the start right ?, but after taking control, I again engaged loiter mode again, but this time, the craft did hold position for some time before landing.
And also after take off, the craft did hold position for plenty of time.
What is going on here, and also how compass effects the gps lock of the craft
If i were to enable IST compass and redo the compass calibration again, then will the problem resolve.
I still don’t know how my compass got damaged, I thought Hardware failures were rare.
FYI just before few flights, I accidentally slammed the quad against a wall, the compass should have damaged at that time. But the damage didn’t show for few flights.
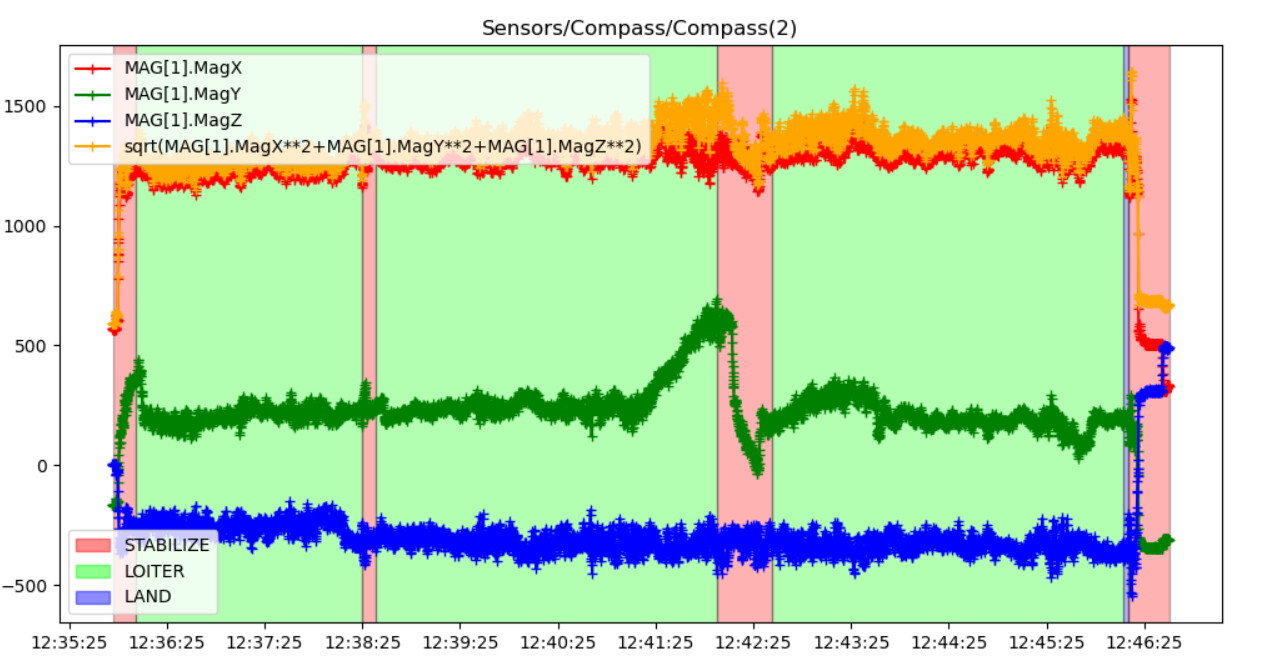
I have replaced the compass and did a test flight, The flight went great, There are no significant deviations from the gps lock and there are no large yaw drifts,
Can u check this from the logs and let me know and also how is my thrust to weight ratio, is it good
And also can you let me know if u observe any unknown problems.