I’ve experienced unexpected yaw behaviour when flying the same path a 2nd time. The parameter
WP_YAW_BEHAVIOR is set to 3 in both cases but in the 2nd try the copter just didn’t steer yaw in the flying direction but let me steer.
I also tried to set ROIs but it’s the same issue. Any idea what could be the reason or what to look at?
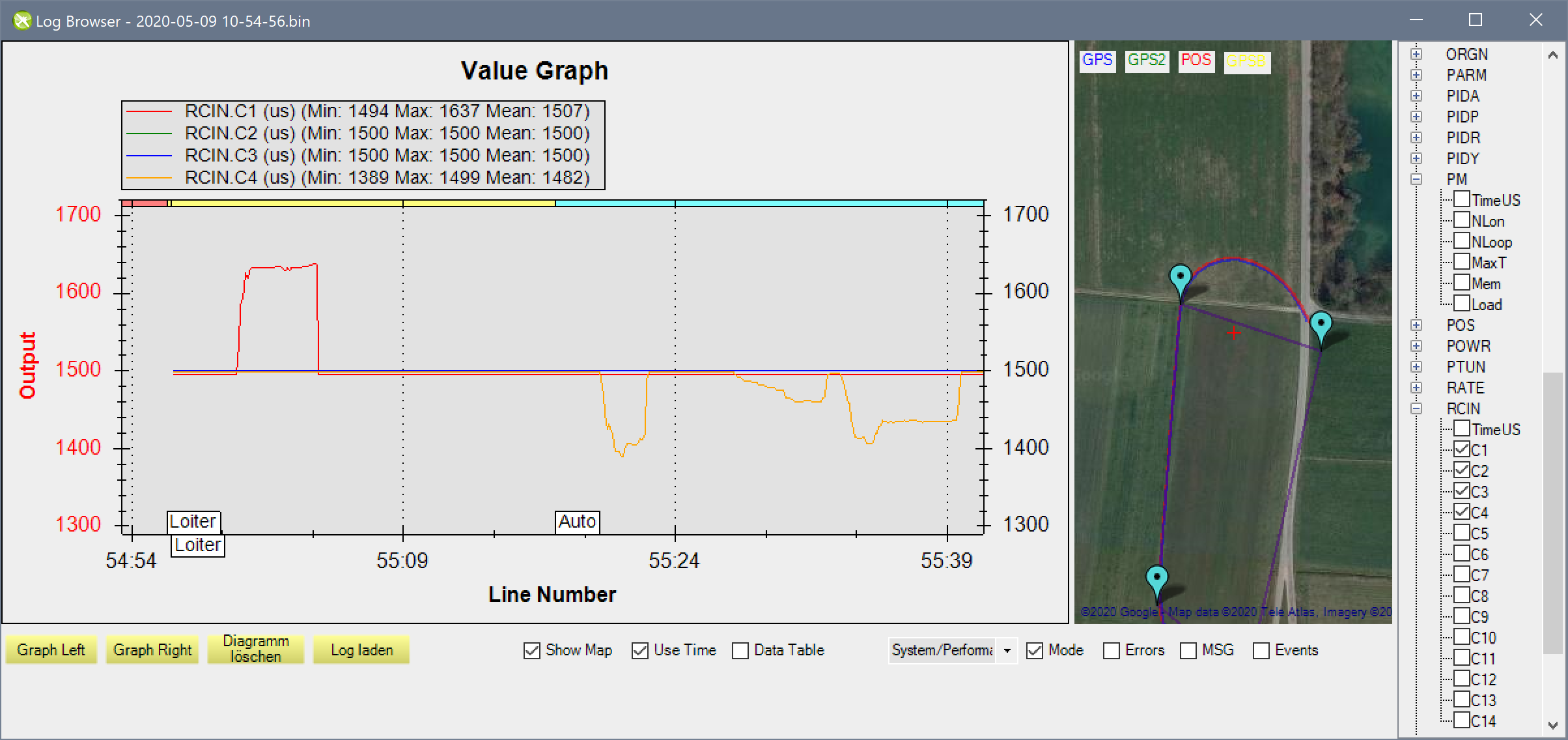
just to be sure I looked at the RC inputs and RC4 (yaw) is showing 1499 when starting Auto flight mode. As the copter direction didn’t align with the flight path I started to steer manually at 55:20 and again at 55:27:
these parameters I suspected:
WP_YAW_BEHAVIOR 3
RC4_DZ 10
so to me they look fine, but what prevents the copter from facing along GPS path automatically?
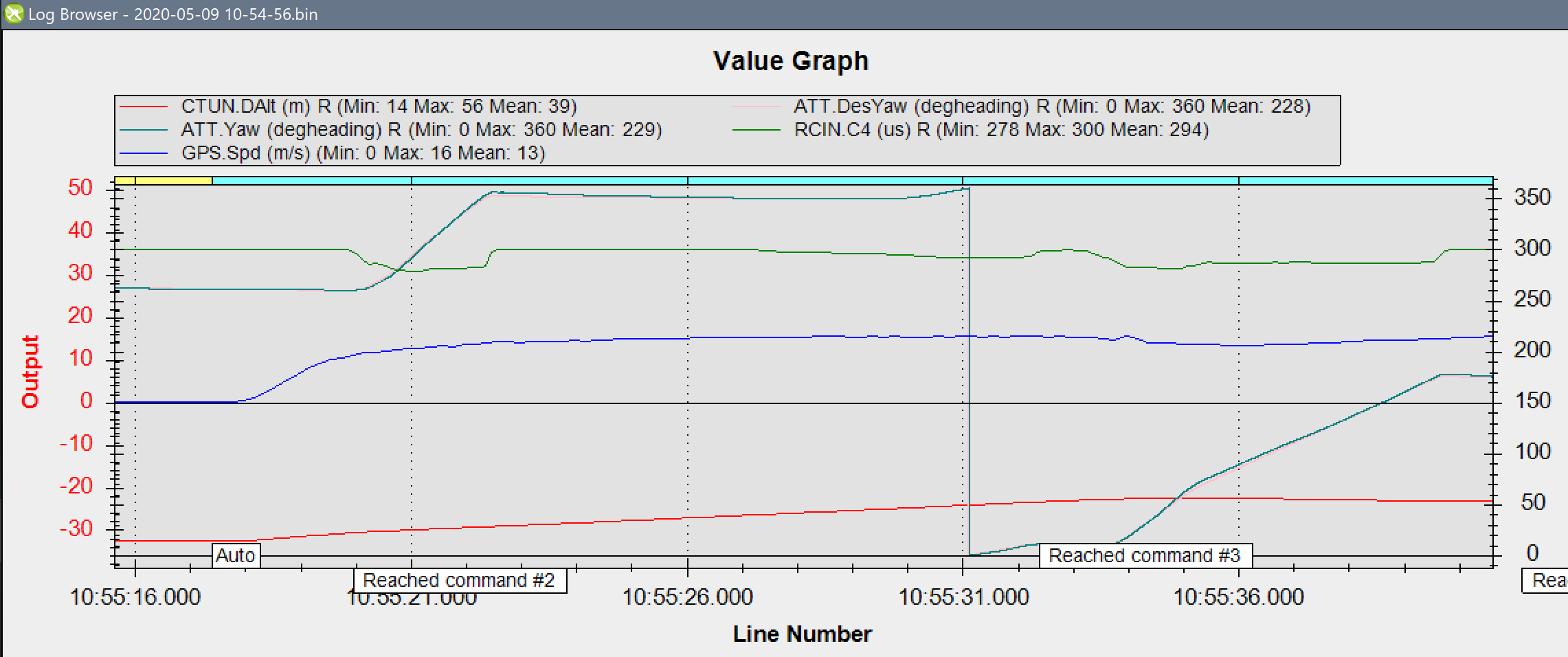
from my understanding the copter should yaw to the direction of flight as soon as the mode is changed to “auto” when WP_YAW_BEHAVIOR=3 is set. But here it’s building up speed to go to the next waypoint without the nose pointing there. After 2 seconds I’m steering manually yaw where I wanted it to be automatically.
When reaching the next waypoint (3) the hope to turn automatically was destroyed again
*in the diagram RC4 is yaw, it’s scaled by 5 to have a better fit to the other values on the axis