I’m having a problem with ardurover that I can’t get out of.
I add a single waypoint to the rover I made in mission planner and set a straight line and load it to the rover. when I switch to auto mode, the rover moves in the opposite direction of the direction it should go and does not go straight.
As far as I know, the front of the autopilot is the front of the vehicle. although this is the case, I cannot understand why it goes in the opposite direction. i could not solve this problem. i am attaching a video and my param file showing the problem.
Also have you run Motor Test in Mission Planner? Testing Motor Direction
In case Acro Mode does not drive correctly this will most likely save another post asking why,
I am evaluating your suggestions and readjusting my tuning settings from the beginning. However, at this stage, I would like to get confirmation that the hardware connections are correct. Can you consider my hardware connections according to your experience.
First of all, let me talk about the hardware I use.
Motor controller - Cytron mdds30
Autopilot - Pixhawk orange cube + M8P Gps
Telemetry - RFD868x
4 motors are available. 2 motors connected to the right channel of the controller and 2 motors connected to the left channel
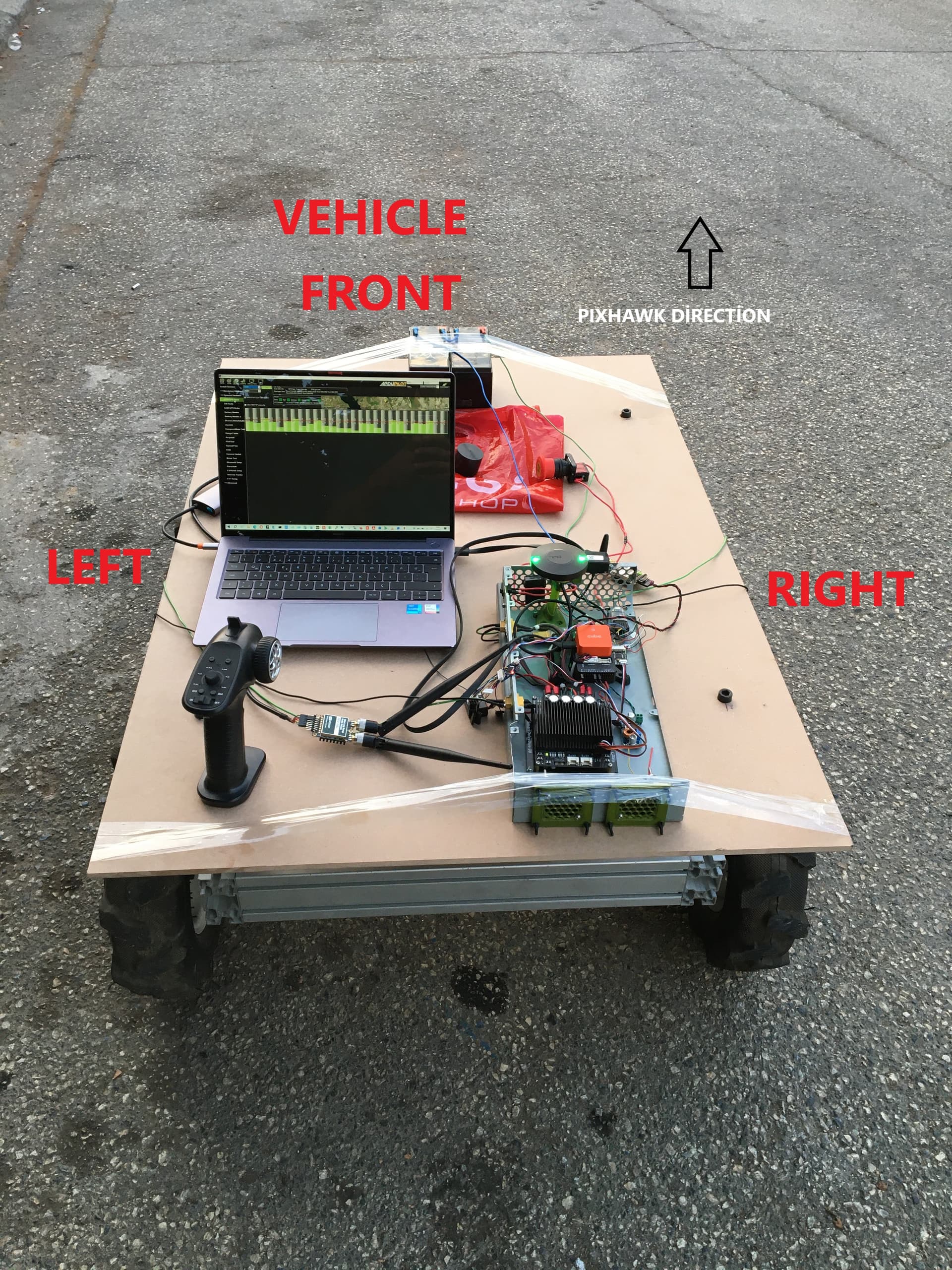
The image I positioned this equipment on the vehicle and showing the directions of the vehicle is as follows.
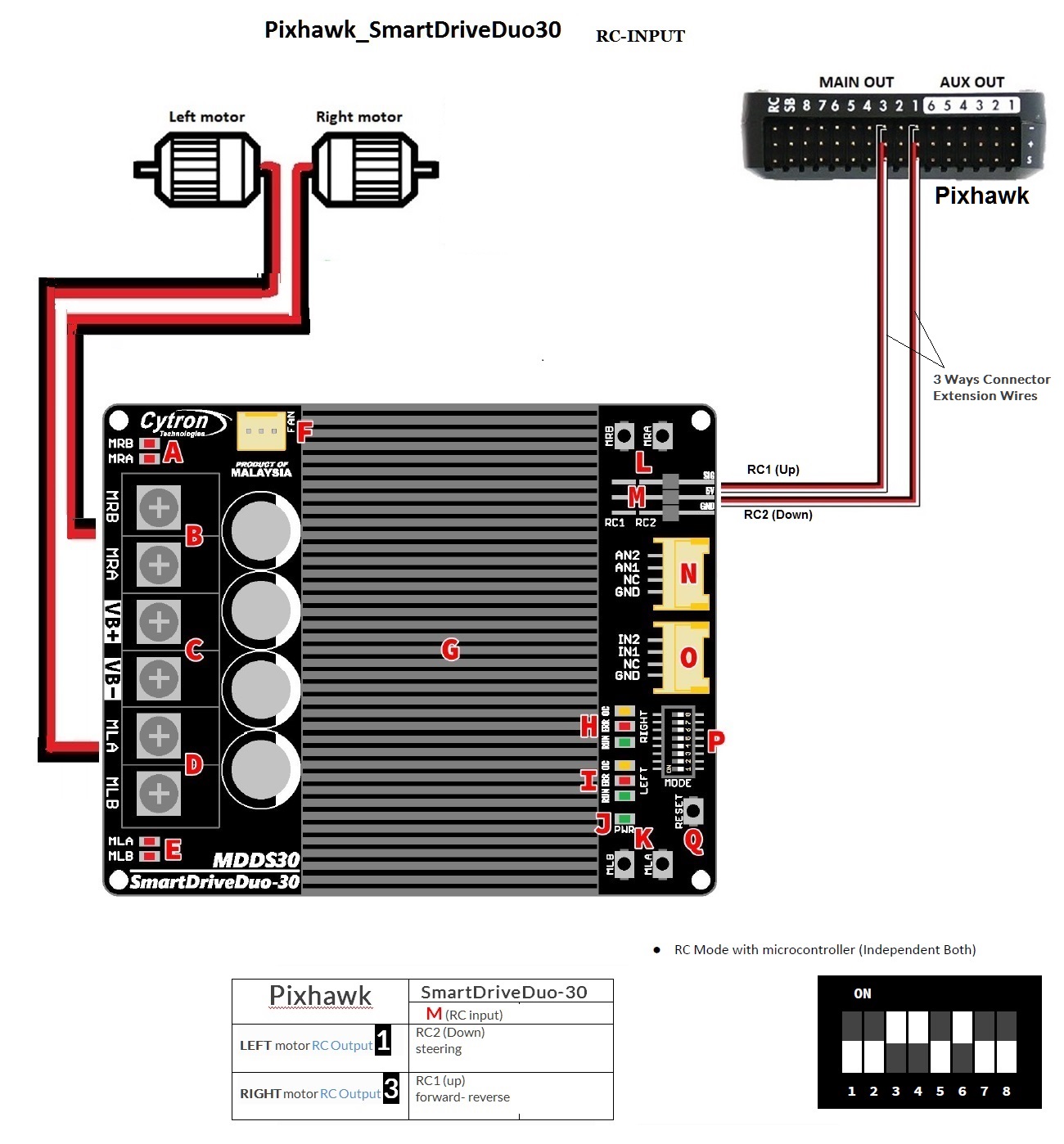
My connections with the motor controller are as follows
The dip switch settings of the motor controller are in RC Independent both mode.
RC 1 channel of the motor controller is connected to channel 3 on Pixhawk
RC 2 channel of the motor controller connected to channel 1 on Pixhawk
You can see the image below showing one to one my connections and the dip switch settings of the motor controller. You can also look at the user manual of the motor controller at the address below.
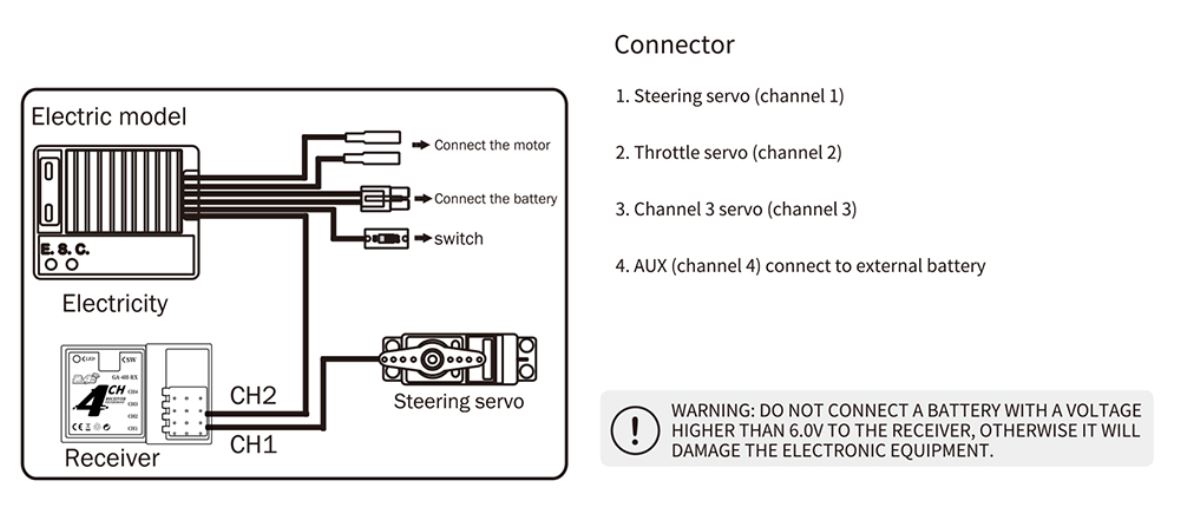
channel 1 of the ppm encoder (aka Roll) is connected to channel 1 of my remote receiver
channel 3 of the ppm encoder (aka Throttle) is connected to channel 2 of my control receiver
channel 5 of the ppm encoder (aka mode change) is connected to channel 3 of my control receiver
PILOT_STEER_TYPE - set to 3 on mission planner
If there is no problem with these connections, I will reconsider all my settings according to the proposals on the page you suggested.
It all looks right but the description of MCU mode I’m not familiar with. I would think you would want this off. Perhaps someone familiar with this can comment.
Does it drive properly in ACRO mode? And, as a corollary, does it drive properly in MANUAL mode?
If MANUAL mode works as expected but ACRO mode does not, you have reversed RC channels instead of reversing servo output, which is the root cause of nearly every user experience like this, and you failed to follow the most basic of tuning instructions outlined in the beginning of the documentation linked above.
I made all the settings on the recommended tuning page, but I have this problem. When I press motor C on the motor test page where the motors are tested, the right motor turns. When I press Motor D, the left motor rotates. According to the position of the pixhawk on the vehicle, the motors to the left of the pixhawk are connected in the form of MLA and MLB in my engine driver. The motors to the right of the pixhawk are connected in the form of MRA and MRB. (You can see the diagram of the engine driver above)
When I make the motor connections in this way, the correct wheels do not turn in the motor test page.
However, when I switch the connection sockets, that is, when I connect the right motor to the left motor channel and the left motor to the right motor channel in my motor driver, the correct wheels turn in the right direction on the motor test page.
When I switch to Acro mode, the problems take a completely different turn and the wheels start spinning in the opposite direction and continuously. Even if I reversed the servo_output settings, I could not turn the wheel directions to rotate correctly and I could not stop it. When I give a command from the remote control, the wheels in one direction rotate fast while the wheels in the other direction rotate slowly. You can see the video in the link.
I could not find the source of the problem and this is tiring me a lot.
I’ve calibrated my radio several times. No change.
I think this is a problem with my motor driver. I think my motor driver may not be at the correct settings.