I built a full size Rover mower w/ a Cube Orange and wheel chair motors. I’m at the point of tuning it, but would like to make a small scale rover to practice learning the fundamentals. My mower is functional with the RC setup via ArduRover, but the size and danger (weight and power) has me a little gun shy.
I’m thinking two small motors and a motor controller attached to a plank of wood. Not looking for pretty, just for experimenting.
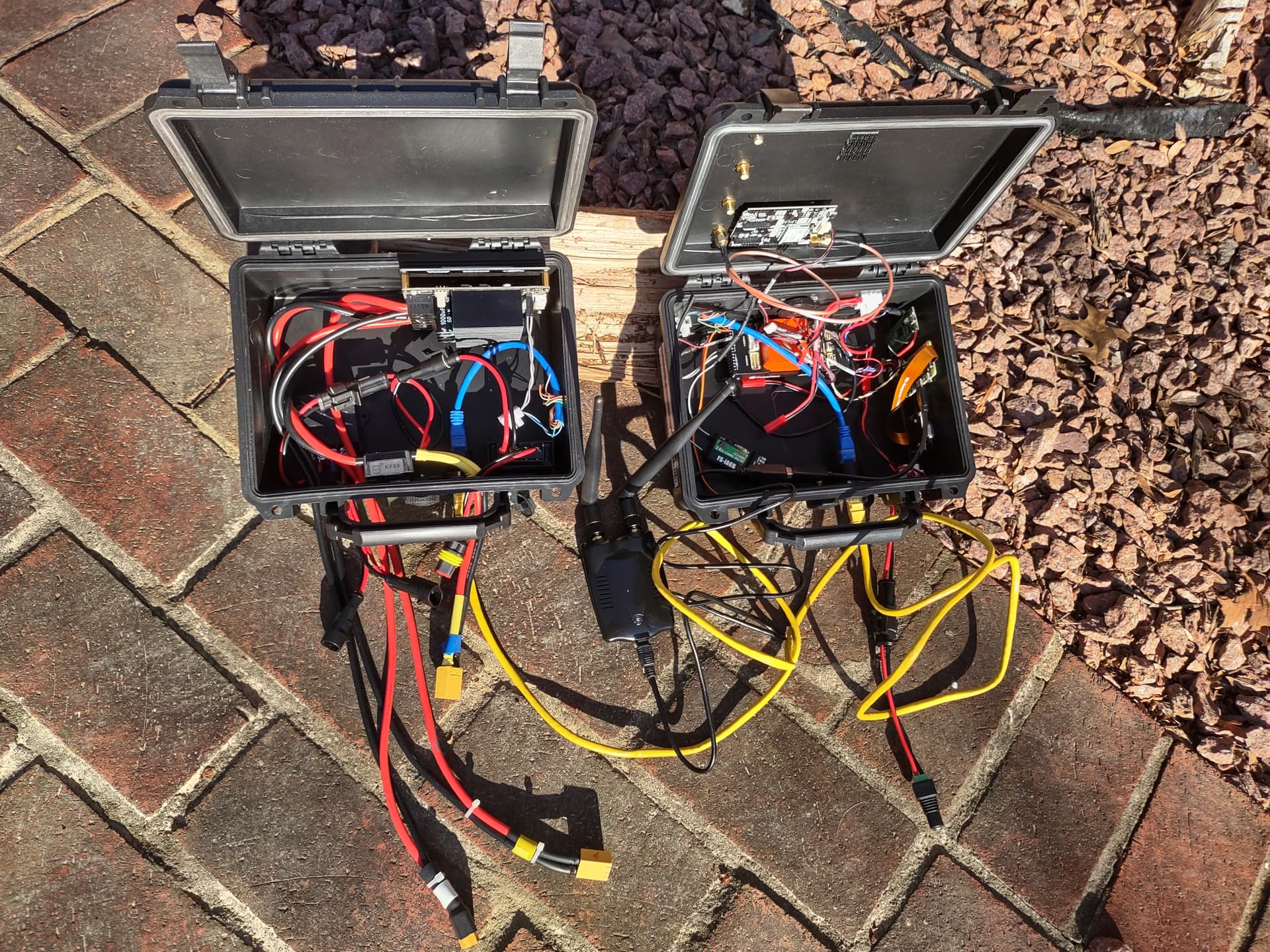
My mower is modular. I separated the FC electronics from the motor controller via ethernet cable to avoid noise. I put each in small Harbor Freight Pelican style boxes. The FC end has a camera using RubyFPV.
For a little one, you could use something like this and some cheap brushed ESCs. Snag some components off the big one to keep the cost down, and away you go.
Indeed. The drivers for the hoverboard motors tend to be a little harder to configure than simple brushed ESCs, but the tiny platform I linked above would likely relegate you to the driveway. I don’t think it would handle much turf.
Thanks. In general, would my bigger Cytron MDDS30 (Sabretooth clone) motor controller work with small brushed motors? It’s rated for 7v-35v. I’m assuming the MDDS30 is necessary for the higher amp draw of wheelchair motors. I’m quite happy that the ethernet connection that separates the MC from the FC. I’m hoping the distance will allow me to use the Cube Orange+ compass instead of a moving base. Maybe wishful thinking. Kenny told me that his spinning blades disrupted the compass.
RZ
I just got one of those Cytron controllers, myself, and so far, so good. I see a lot of projects using them for wheelchair motors (my own uses similar). As long as you keep voltage and current within tolerance, it’ll drive any brushed motor without issue.
I don’t think the internal Cube compass will do you much good. They are notoriously bad, even in nearly ideal conditions. You could try an RM3100 (or a GPS module that has one built in, as many do). ArduPilot’s MAGFIT tool has really helped a lot since Kenny and I struggled so much together with compass issues and eventually did a lot of the alpha testing for moving baseline GPS (that’s how we met…and ended up forming a pretty good friendship through it).
I still prefer moving baseline (GPS for yaw) for most Rover and many airborne applications, and I tend toward the expensive Zed-F9P based modules for their solid performance. However, the CUAV C-RTK 2HP is a real winner at its price point, and I’ve been using it with success on a smaller project.
Long story short - upgrade your compass at a bare minimum and see how that does for you. If you find that it is constantly varying, then moving baseline GPS is definitely your friend (and your wallet’s enemy…).