Hello all,
I have a RPI3 set up in a plane with a original pixhawk on board. So here is what I am doing before I try to run my script.
I take off in manual mode until I reach 100m
I then switch to RTL mode
With the plane circling at 100 meters over the home location I try to run my python code using dronekit.
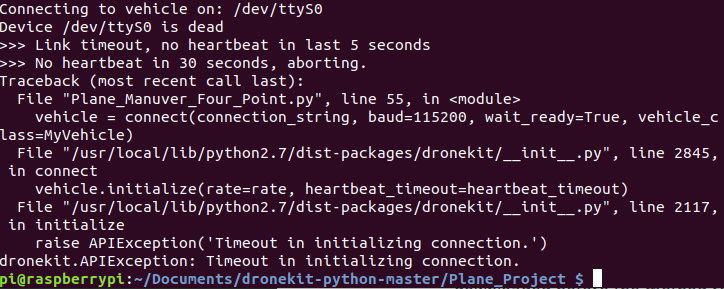
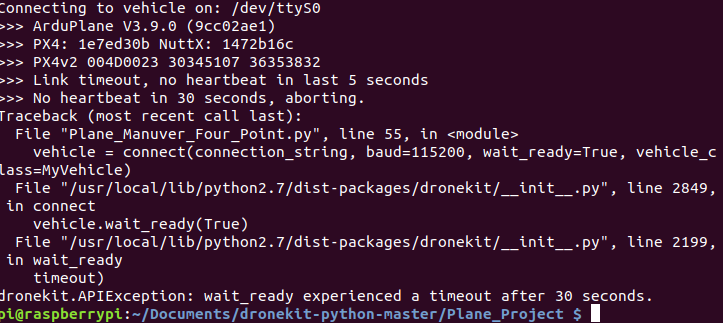
Here is my problem the wait_ready=true option in the connection string is causing the connection to time out.
I see in the documents for wait ready true that the code will wait for all default attributes to be downloaded.
could it be that it is looking for manual mode or something?
If anyone has any ideas it would be much appreciated.
I think notice in the first image I am getting an error that my link is dead then when I run the exact same code again I do not the that the link is dead but it times out in the wait_ready. I just thought I would add some screen shots.
Also my baud rate is set in my code @115200. In the pixhawk params for telem2 I have also set this to 115200.
The strange this is sometimes the code runs with no connection problems at all.
You might try updating the dronekit-python on there; more recent versions
can be more verbose in terms of what’s going on when you’ve got wait-ready
set.
Hey Brian, i’m having the same problem. By serial to usb, do you mean you got a serial to usb converter and plugged the rpi from the UART/GPIO pins into the micro usb port of the pixhawk?
No problem, I have also used serial ports 4 and 5 so if you cant use your telem l to port there is that option as well. Just find serial parameters in MP and set the buad and serial type. I use mavlink 2.
I have also found useing the serial to USB converter I can connect the pixhawk to my laptop running Ubuntu 18.01.