Hi all,
I’m working on a large-scale (25 kg) VTOL quadplane. There are a couple concerning behaviors when flying the plane in AUTO.
First, when flying in transitioned AUTO mode, during turns, the plane will roll to the maximum bank angle (50 degrees) and lose significant altitude. It appears that the plane mainly uses roll to turn, without mixing much rudder. I messed with some of the TECS parameters, but honestly I don’t understand much of what’s going on there. When flying in transitioned FBWA, I am able to turn the plane in a tighter radius without losing altitude by mixing more yaw than roll. Is there some way to command the plane to mix more rudder during turns? I tried changing KFF_RDDRMIX, but this only seems to affect the amount rudder is used to maintain heading, and the plane will still roll to bank limits.
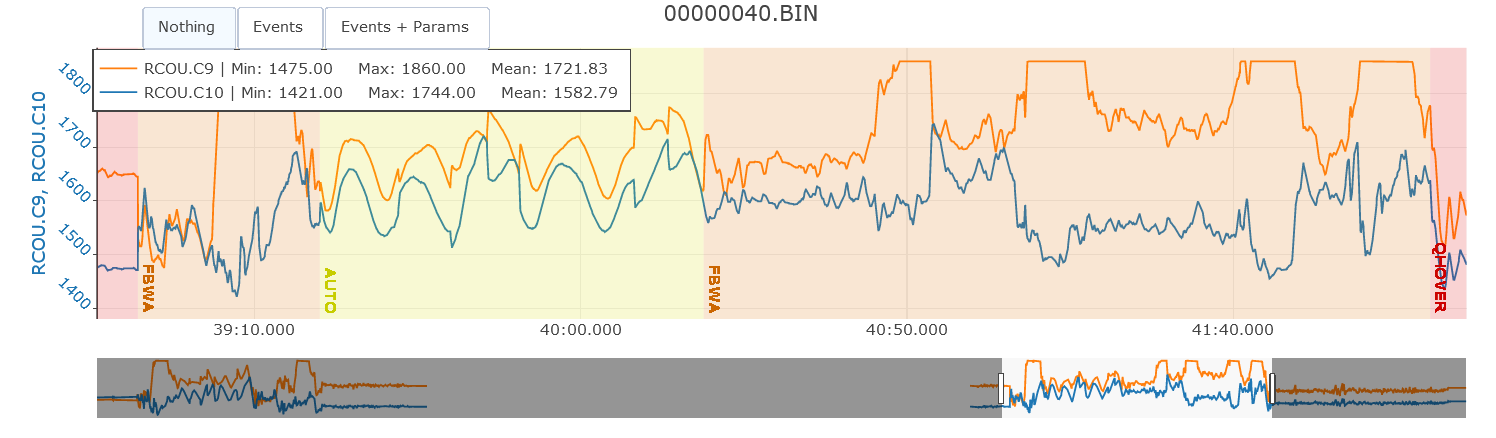
In the above graph we can see that the two ruddervators never saturate during AUTO flight, and saturate during FBWA flight. The graphed FBWA flight was much more stable, had a smaller turn radius, and more consistent altitude.
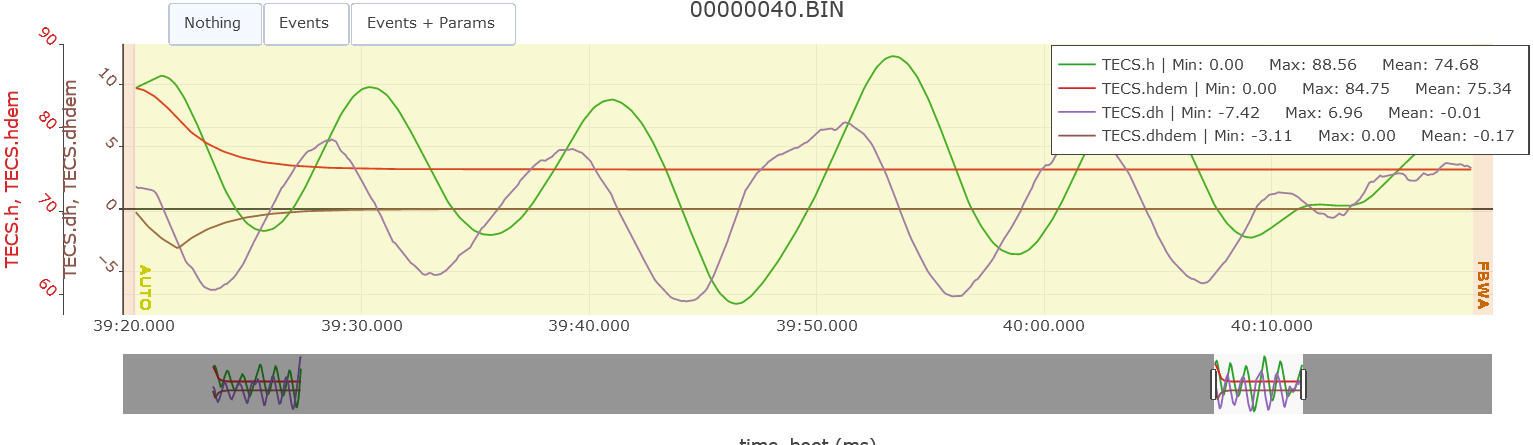
In the above graph, we can see a fairly large discrepancy between demanded and actual height, with differences exceeding 10 meters.
Second, after changing from AUTO to FBWA and reducing airspeed under Q_ASSIST_SPEED, the vertical motors sometimes do not turn back on. In these cases, I have to change to some Q_ flight mode to turn them back on. Is this a bug or is there something I can change to fix this?
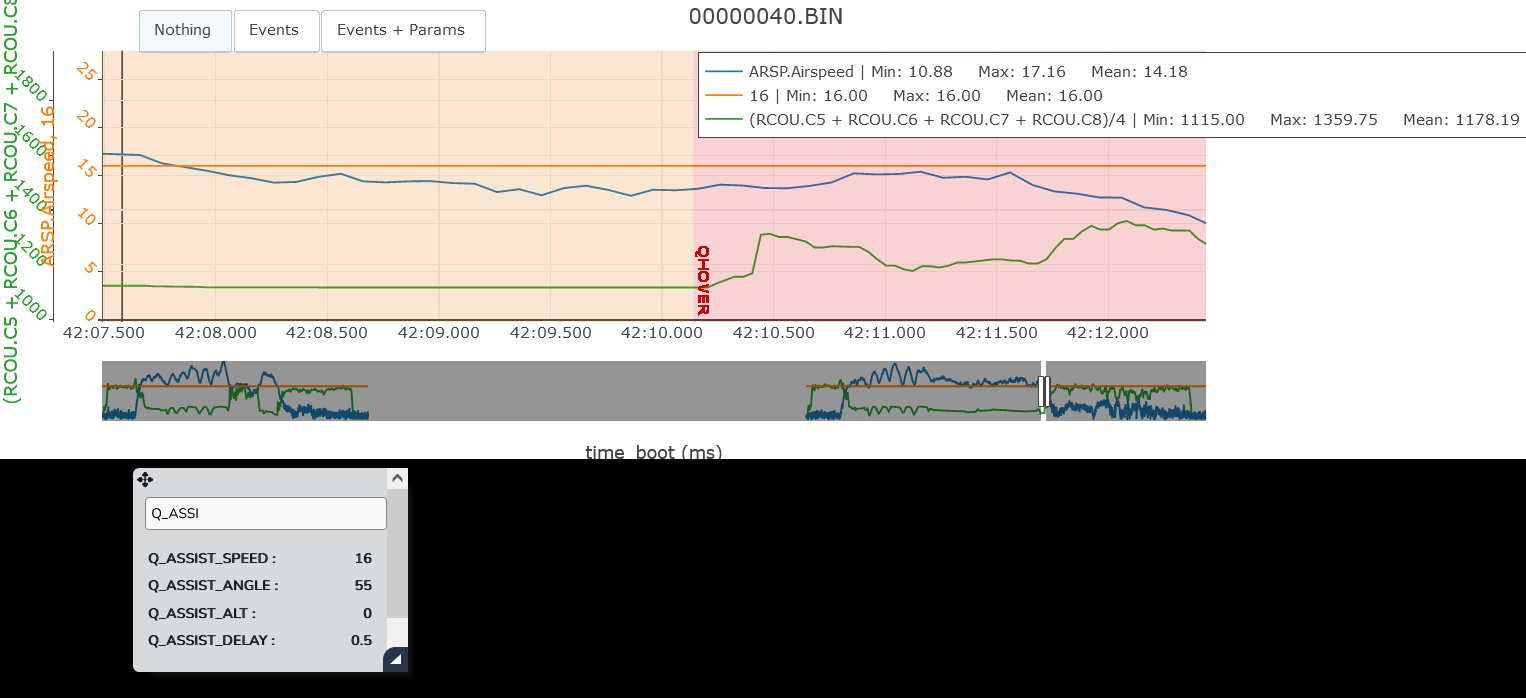
In the above graph we can see that airspeed was below Q_ASSIST_SPEED for more than 2 seconds without any of the vertical motors turning on, while Q_ASSIST_DELAY is set to 0.5 seconds.

The above graph is the expected behavior, with seemingly no meaningful parameter difference.