Hi David, you misunderstood, please read again… Luke’s plane only drew between 5-7A (this is lower than e-calc calculation)…
… . Im using KDE 3510XF 475KV motors with 12x12 props on my Believers. At MTOM, I get between 5-7A draw at 19m/s. Truly an excellent platform…
Tony
He’s talking about the VTOL version of the Believer, which is pulling 22 amps in cruise.
Sorry, I think we are talking two different things. I refer to his posting here:…
“I am using KDE 3510XF 475KV motors with 12x12 props on my Believers. At MTOM, I get between 5-7A draw at 19m/s. Truly an excellent platform”…
Do I misunderstood his words?
Before throwing in the towel, may I suggest confirming whether the quad motors are truly turned off in forward flight, maybe check the log for pwm to motors?
Excessive power draw could also be related to some other component being shorted out?
Hi Tony,
Luke’s Believers are drawing 5-7 amps in forward flight using Nate’s setup. However, his 2300mm Freeman VTOL seems to be drawing 20 amps in Forward Flight so we are puzzled and don’t have anyone else’s data for comparison.
Ali,
Good suggestion!
No, the logs show no signal on the rear lifting motors.
I was thinking last night of perhaps adjusting the angle of the tilting motors up a few degrees. At the moment, the front tilting motors are set to horizontal (parallel to the airframe). I wonder what will happen if they are angled a bit up to assist with lift. Or perhaps it is currently set that it is pulling the airframe down slightly.
Sadly, all of this will have to wait as I will have to comply with local lockdown regulations due to COVID-19 and will not be able to test fly again.
Luke,
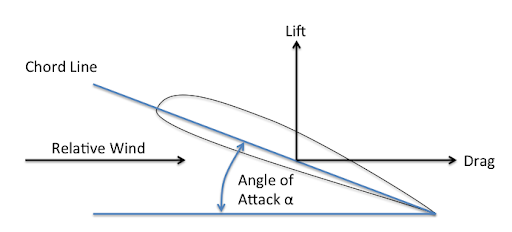
I’ve been wondering about the angle of the front motors in level flight. I have mine set horizontal, but I suspect that isn’t correct. Most planes fly at a positive AOA. A few degrees may lead to a big difference. I suggest you start with 3 degrees. Please let me know the PWM difference between horizontal and 3 degrees.
Or perhaps it is currently set that it is pulling the airframe down slightly.
I think that is likely what is happening.
Dave
Edit: I would expect the same motor horizontal position to be used in the VTOL Freeman versus the Believer.
From ArxAngel’s review of the Believer on RCG here, I found a motor mount image of the Believer which suggested a slight down angle. This was confirmed about 4 minutes into his video here.

I agree with you, but it is hard to tell if there is an upward cant on the Believer engine mounts. The aft VTOL engines probably have an effect on the AOA.
Either way, it can’t hurt to try moving the front engines a few degrees above horizontal.
Sorry, I just edited my post above yours.
Motors go down for positive AoA.
Motors go down for positive AOA? That doesn’t make sense.
You’re right, I agree.
Hello Greg, thank you for your clarification. I understand that Nathan’s plane is not Vtol. So are you saying that Luke’s Believer plane that drew 7A current is not a Vtol plane, correct?? By the way I am also in the process of building Vtol with AUW around 7-8 kg and I think quad 4+1 configuration has a better efficiency compared with the Y3 tilt tricopter. I have problem with Vtol Y3 tilt tricopter setup. If I want to use Nate’s system using two Apc props. 12x12 at front, the Vtol can not take off, because not enought thrust. So I need to use bigger size which will draw bigger current during cruising…
Correct, it mimicked Nate’s Believer setup and findings. So we have Believers, and two lengths of Freeman VTOLs; 2100mm and 2300mm. Our posts can get muddled. ![]()
VTOLs are certainly made up of compromises.
Dave,
I looked through Arxangle’s reviews and Nate’s blog and did not see any mods from stock for re-positioning the motor angle. The stock angle may just be slightly down on Arxangle’s Believer. Both Nate and Luke have working models at 7amps FF so perhaps they can confirm.
I really want to see the thrust line compared to the chord, which is hard to discern from the picture you uploaded. Also, the plane pitch axis is likely positioned differently while flying than sitting flat on a table.
We had a cold but sunny day yesterday so I got more hover testing in my backyard using QSTABILIZE mode. I am weary of testing QHOVER and QLOITER for the first time in such a confined area so I will wait until I can go to a larger park. My wife took some photos. To my surprise, the 6-pin connector from the PM to the Pixhawk had come off so I was using back-up power from the servo rail. So my back-up power system has been tested but I did not get any hover current measurements. I need to replace my 6-pin Molex JST connector with one that has a better fit. I then dab some Foam-Tac around it so it cannot come loose.
Don’t let the green grass fool you, it had snowed the day before and is a dark rainy day today. 


3 Likes
Looks good Greg. Looking forward to updates!
I replaced my 6-pin Molex connector from the PM with a more normal one. I bought two sets of 10 with wires on eBay for a nice low price. I have no idea where the oddball one I originally picked out came from but it never locked into place properly. Now it is locked and secured with Foam Tac.
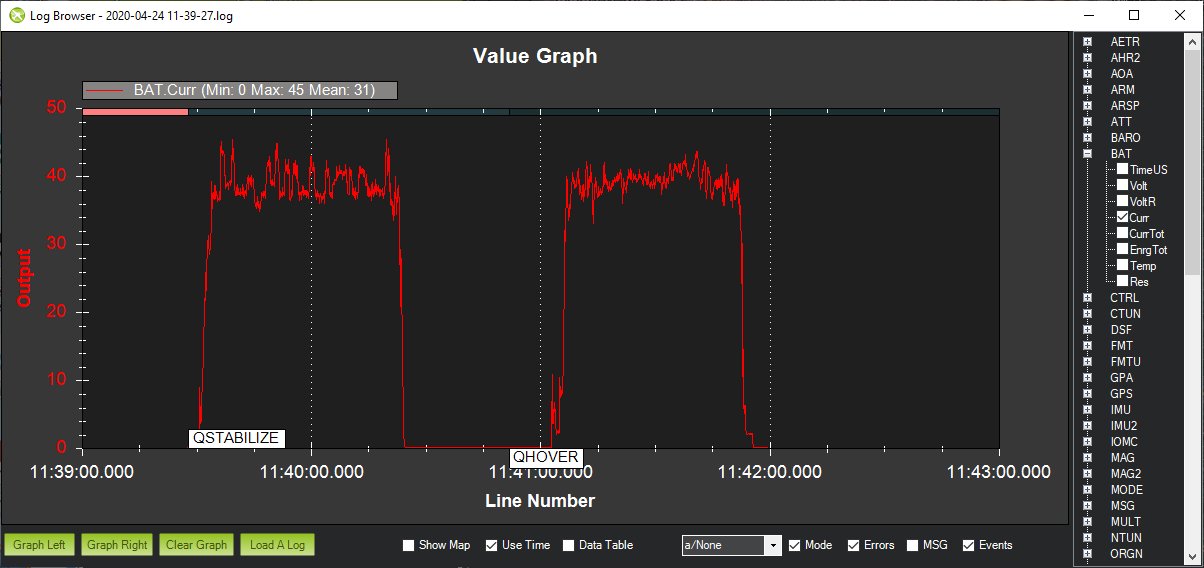
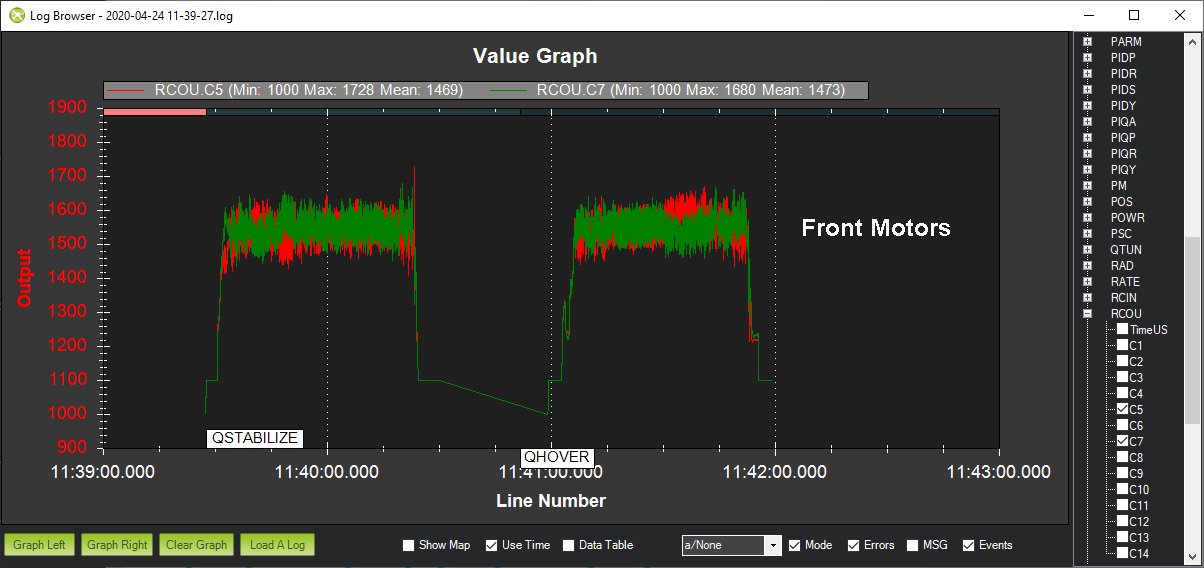
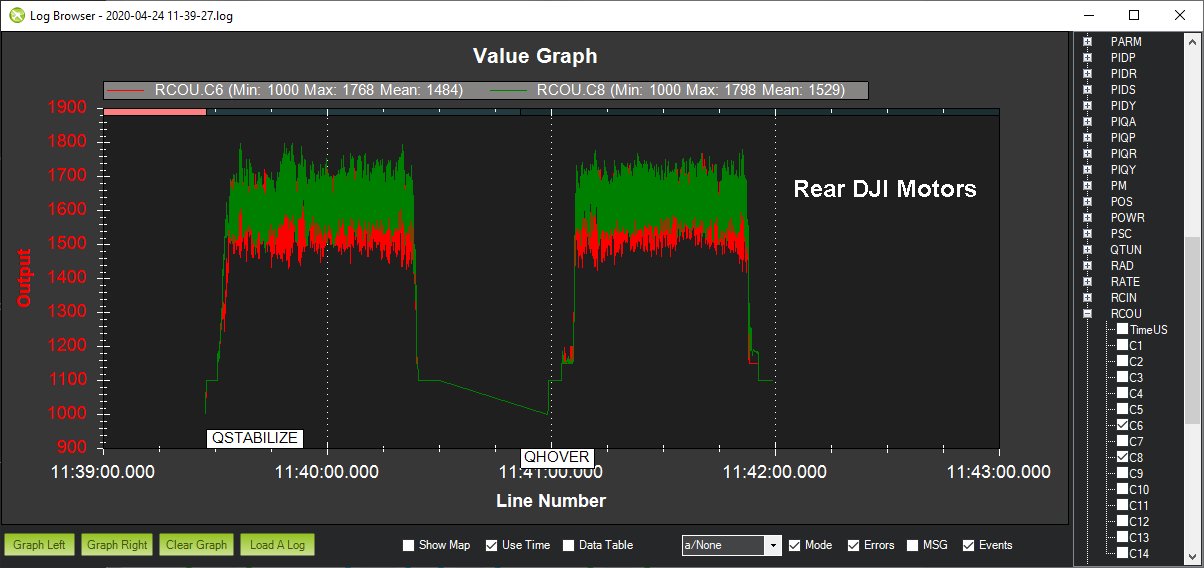
Since we had some sun today and upper 40s I got some new logs in for hovering. The current looks to be about 40amps in both QSTABILIZE and QHOVER modes. (Yeah, I got crazy and broke my rule for the backyard  ) My 6s 10AH Multistar pack weighs 42oz (1.2kg). I have 11oz (312g) weight in the nose to simulate my 3-axis gimbal and GoPro H3 setup. The S100 (or dummy weight for it) was not installed below.
) My 6s 10AH Multistar pack weighs 42oz (1.2kg). I have 11oz (312g) weight in the nose to simulate my 3-axis gimbal and GoPro H3 setup. The S100 (or dummy weight for it) was not installed below.
Greg.
Your hover current is less than mine. Or should I say less than mine was… What is your AUW?
I measured it today for the hover testing. All up weight RTF is 11.63lbs (5.28kg).
- Fuselage, Tail, and Nose Gimbal/Camera - 3.5lbs (1.59kg)
- Wing 1 - 2.75lbs (1.25kg)
- Wing 2 - 2.75lbs (1.25kg)
- Battery - 2.63lbs (1.19)