Hi Jose I 'm using 1.3.75 and have Q modes available. Just in case… when you load the parameter file you need to write the file as well, otherwise it doesn’t save to the flight controller.
1 Like
Jose,
I’m not sure what else Mission Planner needs to think it is connected to a Quadplane.
Perhaps, as a workaround, you can go into the Flight Modes section under the Setup button and select the Manual and QStabilize modes so that your radio can enable then for your setup of the tilt servos.
Hi Steve,
I did write the param file after loading it but didn’t make a difference
Hi Greg,
Thanks for this suggestion, did it and it works.
Finally got the Q modes. I reverted Mission Planner to version 1.3.74.
It’s good to know. In the Mission Planner forum, there does appear to be an issue with v1.3.75. Andras has a workaround that may help below. The thread is here.
Eventually, the issue was not data corruption but incorrect handling of Coax and Single copter. However, if your parameter data got corrupted, you can create a full reset as described above. (Please note that you will also lose all cached map data as well)
1 Like

Ashes to ashes, Foam to dust …
It did a slow roll and hit inverted at speed. SD Card is toast (literally  )
)

1 Like
Mike,
Sorry for your loss. That’s an expensive fire!
No SD card sucks too. What mode was it in when it did a slow roll? Auto?
Wow!
Sorry you lost your aircraft. I hope you figure out what went wrong. Thanks for sharing the terrifying photo.
It was in auto. Just have the log sent to MP from from the rfd900,
All that’s left is some carbon ash.
Hi everyone ,
I have done reset FC px4 cube v5
I need param & firmware with no problems , for freeman 2300 vtol
i will be so thankful to you …
Ala- admay
Hi Aladdin,
MFE keeps all their files on-line here at GitHub.
Freeman Firmware Builds
Frame Parameter Files
Cheers!
Hi GregCovey
Thank you so much ,
have you faced any problem with that param?
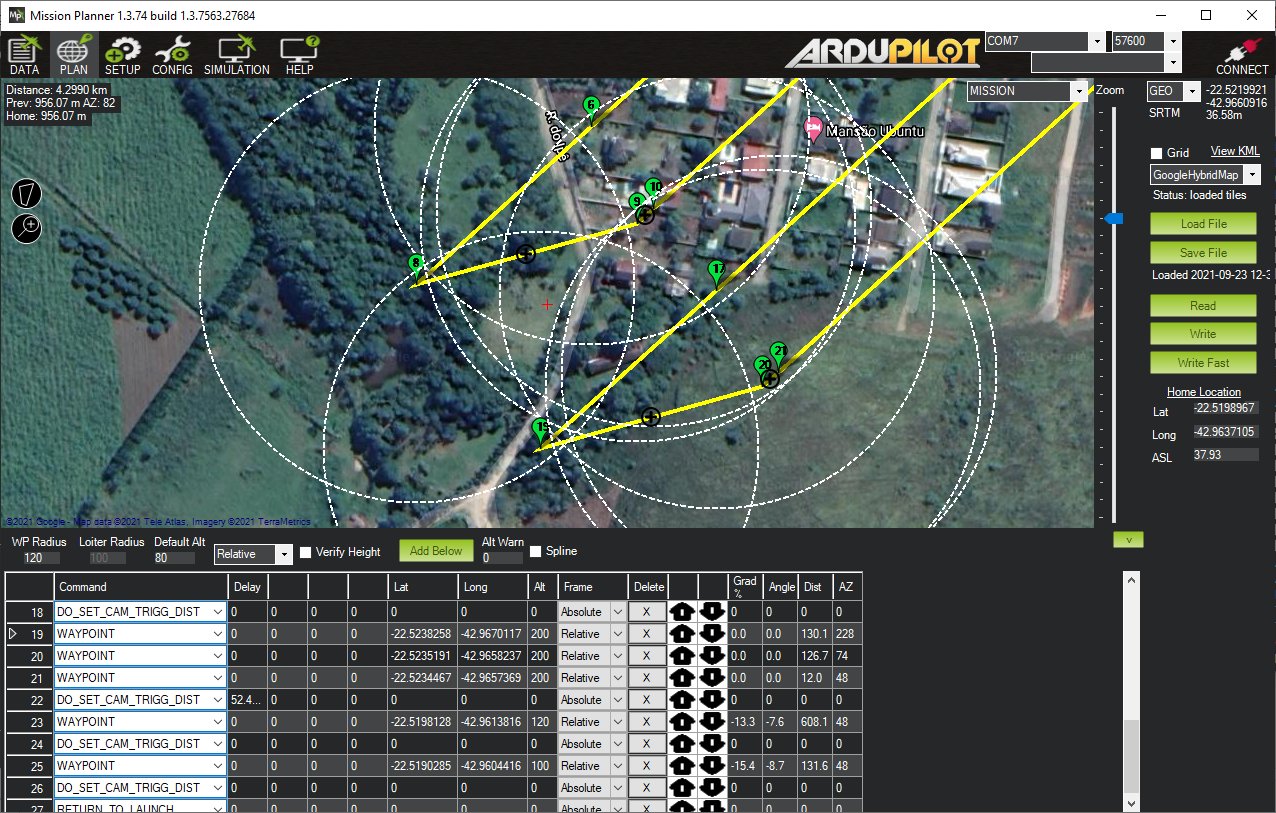
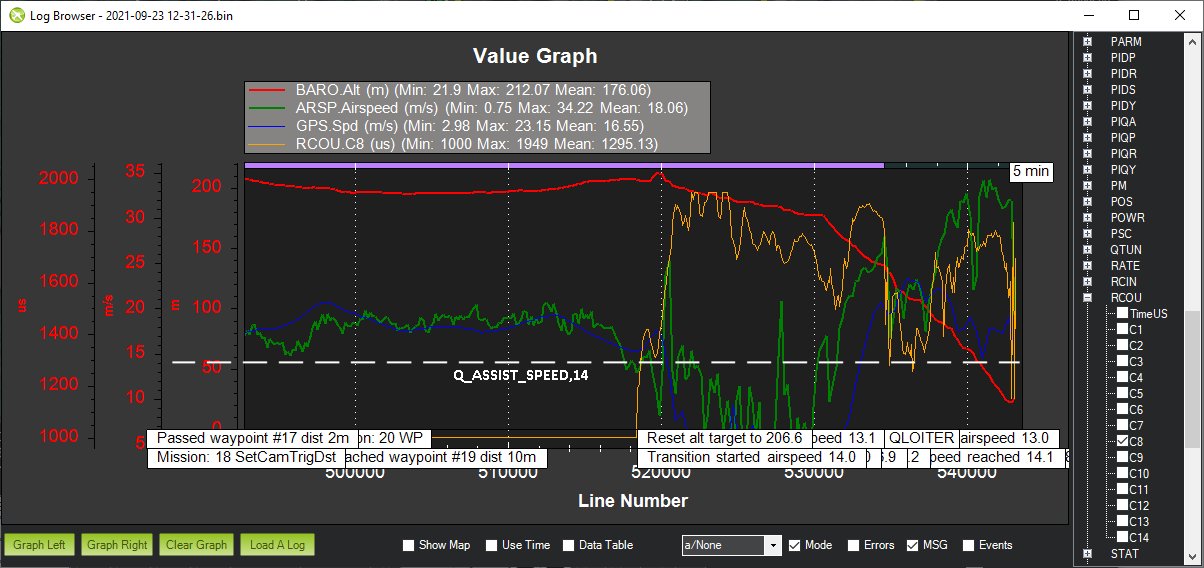
Why did my VTOL drop? perfect takeoff, flight within standards, suddenly, at the end of the flight, it starts transition mode (away from the HOME point), because it has reduced too much Q_ASSISTENT speed was 14m/s, and turns on the rear engines, then it goes into a spin and falls !
LOGS: LOGS - Google Drive
FIRMWARE 4.0.9 official, I have some Vtol freeman and other Nimbus, all ways using same parameters !
I see probability in BEC of servo trail failled. I like to confirm that !
Hi @Mike_E, It’s very hard to see that ship on fire! I know exactly what this is like! I’ve mounted some VTOL since 2018, and it’s not common to have an accident, my first one was to reverse the direction of the compass, after takeoff, first transition, it goes in inverted flight!!!
Last Friday, another accident, at 200m altitude, Sony miniaturized the A6000 on board, unfortunately. The plane made another flight before, first I lost a BEC and made an emergency landing, I load the BEC and go to a new flight to test, I feel the problem was in the bec wire!
I hate it when they crash from mechanical problems.
Gonna wait until I get the Striver working before getting another Freeman …
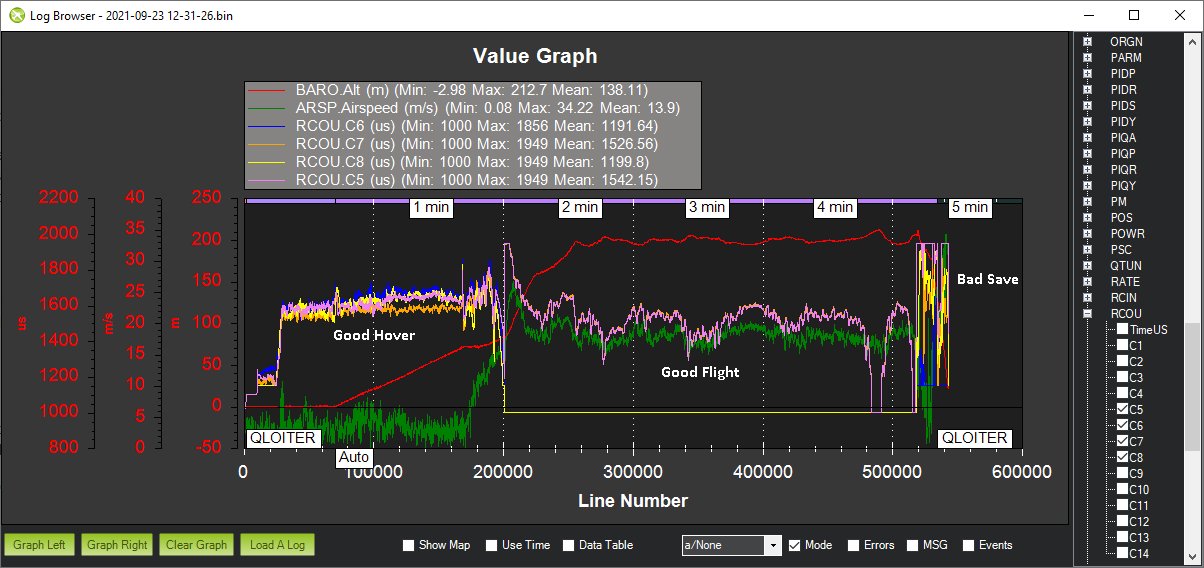
I looked at your log and it confirmed your findings. At some point on the way to WP20, the speed reduced to below the Q_ASSIST_SPEED setting of 14. Up until then, everything looked fine. It appears that the Q_ASSIST_SPEED feature created a bad “save” on the low speed flight. I am not convinced of the actual cause of this issue but I have always wondered what would happen if a Q_ASSIST_SPEED was triggered on a tilt-rotor quadplane. I have been told that it should work but I have never tested it on a tilt-rotor, only on a traditional quadplane VTOL. I’ll continue to investigate. I was using the custom MFE firmware.