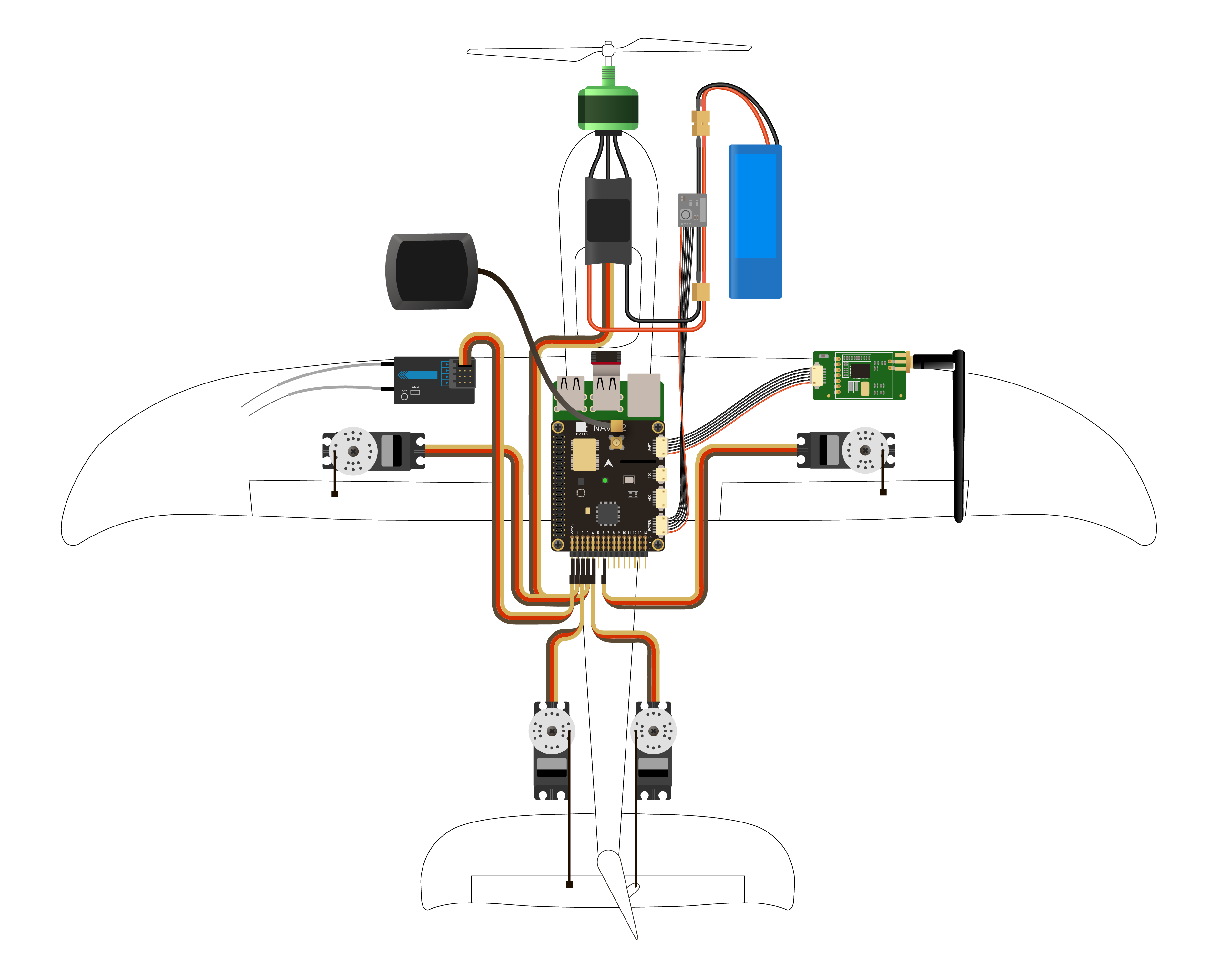
Hello, my vtol plane disign has:
motor 1, motor 2, motor 3, motor 4, Pusher motor
Right elevon, Left elevon, Rudder, Throttle
It’s small vtol for academic needs.
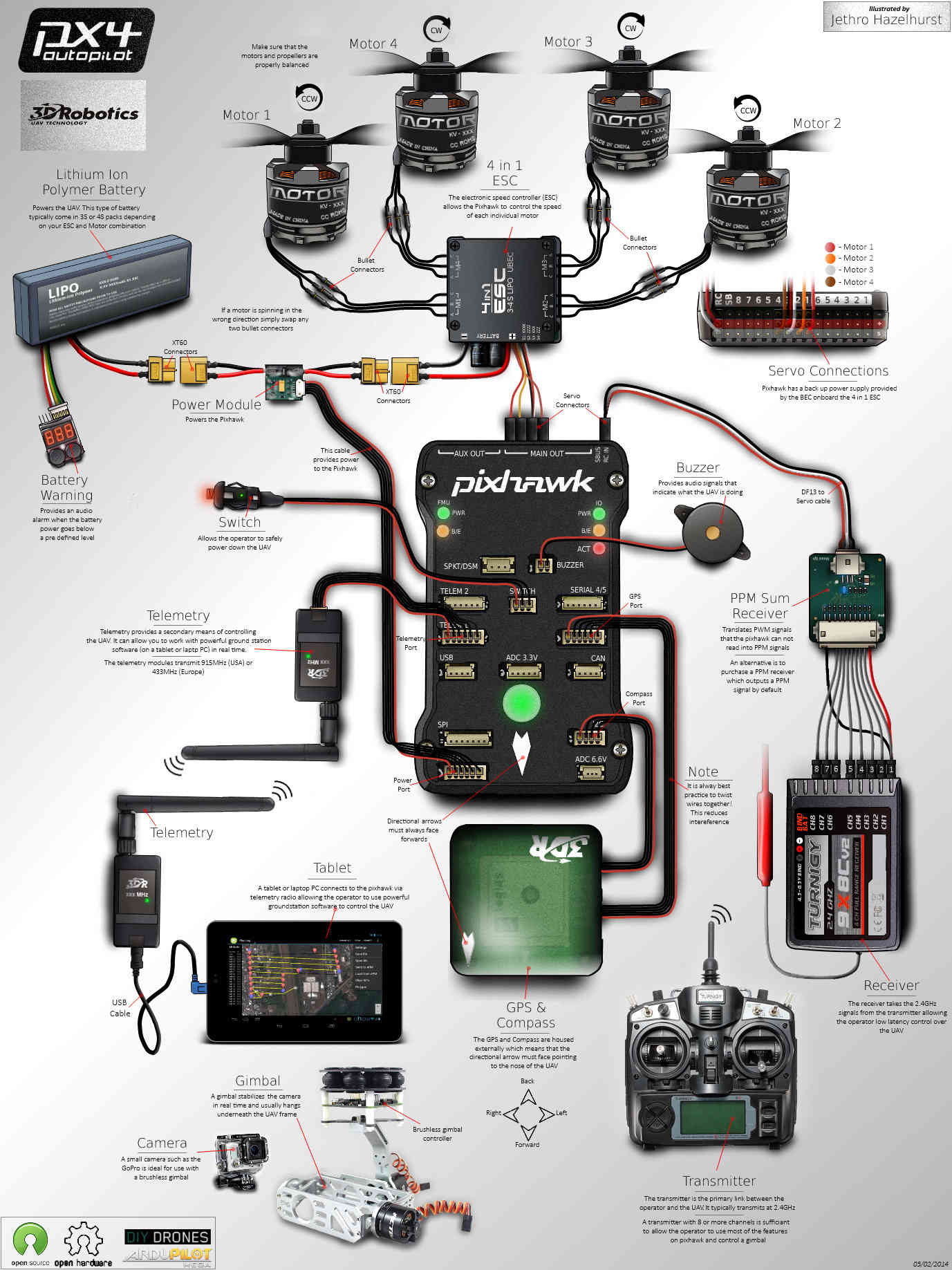
I want to use with Pixhawk PX4 Flight Controller PIX 2.4.8 32 Bit
In the ardupilot documentation I found this warning: Do not connect any servos or other devices to the PWM outputs of your receiver. The RCIN port on the Pixhawk is designed for low power devices only, and a servo or relay may draw a lot of current from the receiver. If you connect a servo directly onto your receiver while the receiver is powered from the RCIN port of your Pixhawk you may damage your Pixhawk.
In this page - https://ardupilot.org/copter/docs/common-pixhawk-wiring-and-quick-start.html
My question is how I connect servo motors for two Elevons, Rudder and Throttle.
Is servo motors needs to be with some kind of special connections?
There is no special connection. Plug servos to the outputs directly. Wiki says that do not connect the servos to the receiver directly because you are connecting the receiver to the rcin. Rcin has its own 5v with limited current rate which cannot supply for higher current demands. If your escs has bec, servos can be supplied from servo rails. Pins on the Plus row at the servo rail are all shorted so if one of these has 5v other pins are also have 5v.
The wingspan will be 650mm, following my calculations the servo motors for the elevons need to be able to move maximum on 14kgf/cm.
I found that this servo is suitable for my needs…
Mustafa, thank you!
I wrote before not correct information, sorry for that.
To be more clear the MTOW need to be around 9 kg.
And the wingspan will be around 650mmx2 = 1300mm.
Because of it following my calculations the servo motors for the elevons need to be able to move maximum on 14kgf/cm.
I have never worked with VTOLs, but you might need strong servos during conversions from vertical to forward flights.
I am not an aerospace engineer first of all, but don’t you have too much weight?
Wing loading seems to be too much, at least from my knowledge.
The vertical flights may be fine if you have enough thrust at the 4 motors but from my experiences, you may face difficulties at forward flights.
I designed a plane and it is ready to fly. The wingspan is 210cm and the chord is 35cm.
MTOW will be around 6kg, which gives 0.816gr/cm^2 wing loading.
Assuming you have a 30cm chord at your wings, so you have 2.308gr/cm^2 wing loading.
This is purely my opinion but you should reduce the wing loading around to the 1 (if possible, less than 1).
Those regulators are stable up to 2amps. I could not be able to see current draw of the servos at the web page. Test the servos with multimeter. If overall current not exceeds 2amps, one regulator is enough.