This is following from the thread in Fighter VTOL 4+1 fixed wing
Moving to here as it is digressing from the original topic.
I hope I have copied this all correctly. ACPUK
This may just look insignificant but it is not, this is a considerable large ark to the left, sweeping the aircraft 180 degrees. Plotting it in plot.ardupilot (55m20s)you can see the significance of this banking. At this point airspeed was 17m/s, so should not be stalling. (VTOL kicks in)
This happens 3 times during this section of the flight.
This to me would indicate a mechanical issue with one on the Alerons.
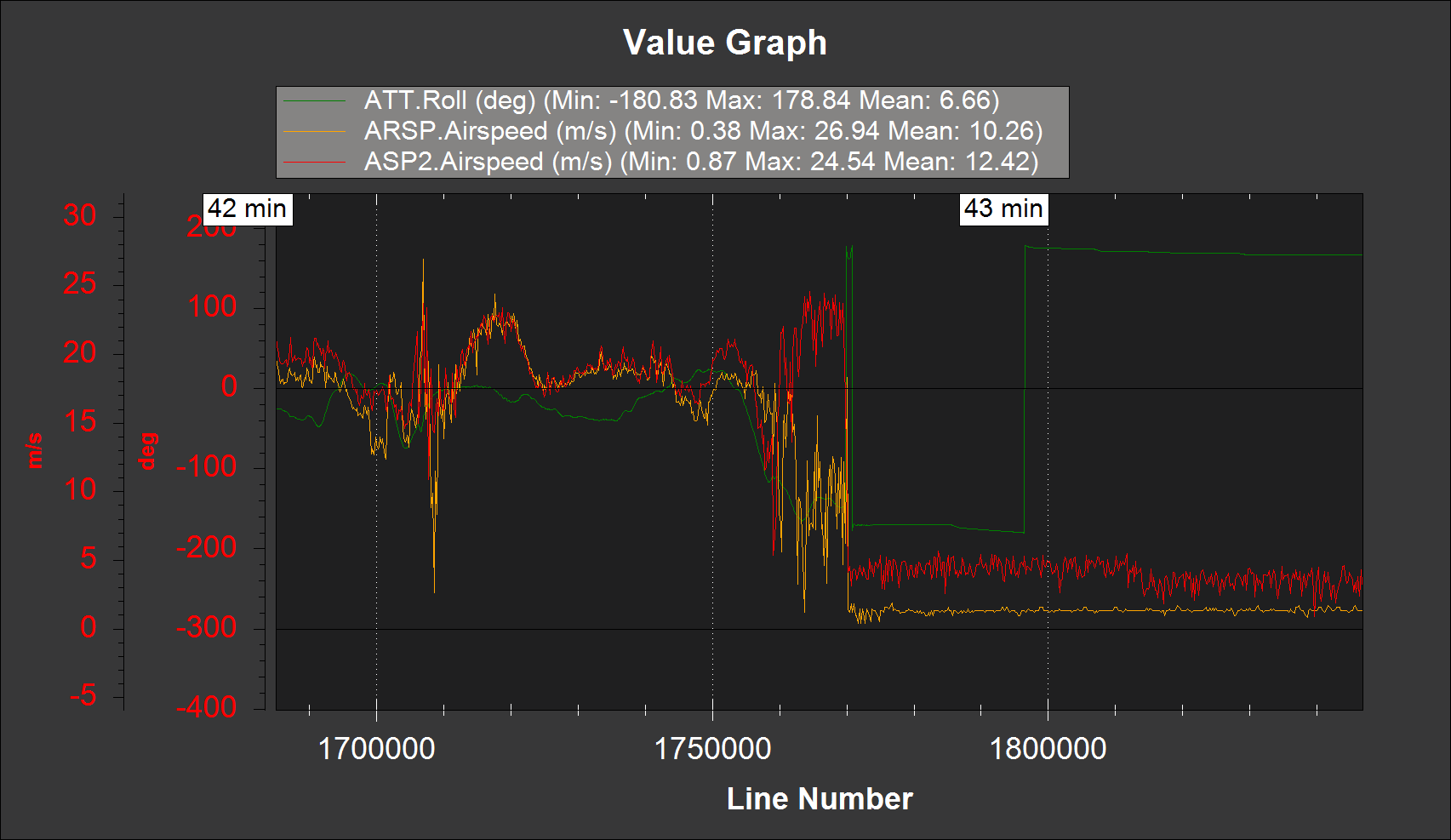
The final bank band and flip; Airspeed is 18ms
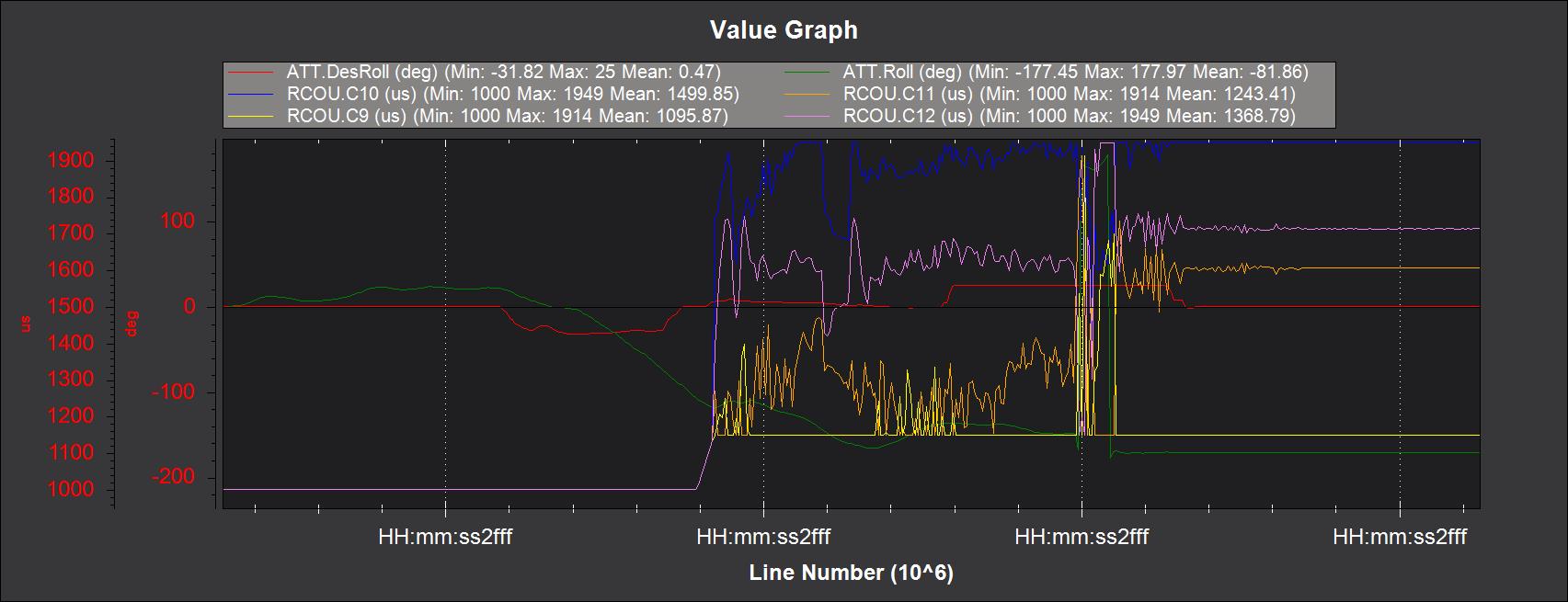
At the point then the VTOL motors kick in (1758363) the aircraft is at -117 deg: -
The dominant motors are Q10 & Q12 being Rear Left & Rear Right !!!
This is odd as this flips the aircraft tail over its nose.
I would have expected Q10 & Q11 to dominate with Q11 being the higher. Pulling the aircraft nose up and left side up back to level.
This is odd.
In any event, I believe this hard bank left at -117 deg was too late for VTOL assets to rectify the attitude.
I will look at the aileron servos and links in the morning.
HI @GregCovey,
There are telltale signs leading up to the flip, most significantly a heavy undesired left roll at -70 deg at time 1701806 : -
This may just look insignificant but it is not, this is a considerable large ark to the left, sweeping the aircraft 180 degrees. Plotting it in plot.ardupilot (55m20s)you can see the significance of this banking. At this point airspeed was 17m/s, so should not be stalling. (VTOL kicks in)
This happens 3 times during this section of the flight.
This to me would indicate a mechanical issue with one on the Alerons.
The final bank band and flip; Airspeed is 18ms
At the point then the VTOL motors kick in (1758363) the aircraft is at -117 deg: -
The dominant motors are Q10 & Q12 being Rear Left & Rear Right !!!
This is odd as this flips the aircraft tail over its nose.
I would have expected Q10 & Q11 to dominate with Q11 being the higher. Pulling the aircraft nose up and left side up back to level.
This is odd.
In any event, I believe this hard bank left at -117 deg was too late for VTOL assets to rectify the attitude.
I will look at the aileron servos and links in the morning.
Good idea to start a new thread since we think there may have been a firmware-related or setup-related issue. So you are using firmware v4.0.9 and I am using v4.0.5. I like to keep in mind what is different with your setup. The other thing was the lower setting of Q_ASSIST_ANGLE to 20 and mine is 30. There were many “angle assist” events in your flight.
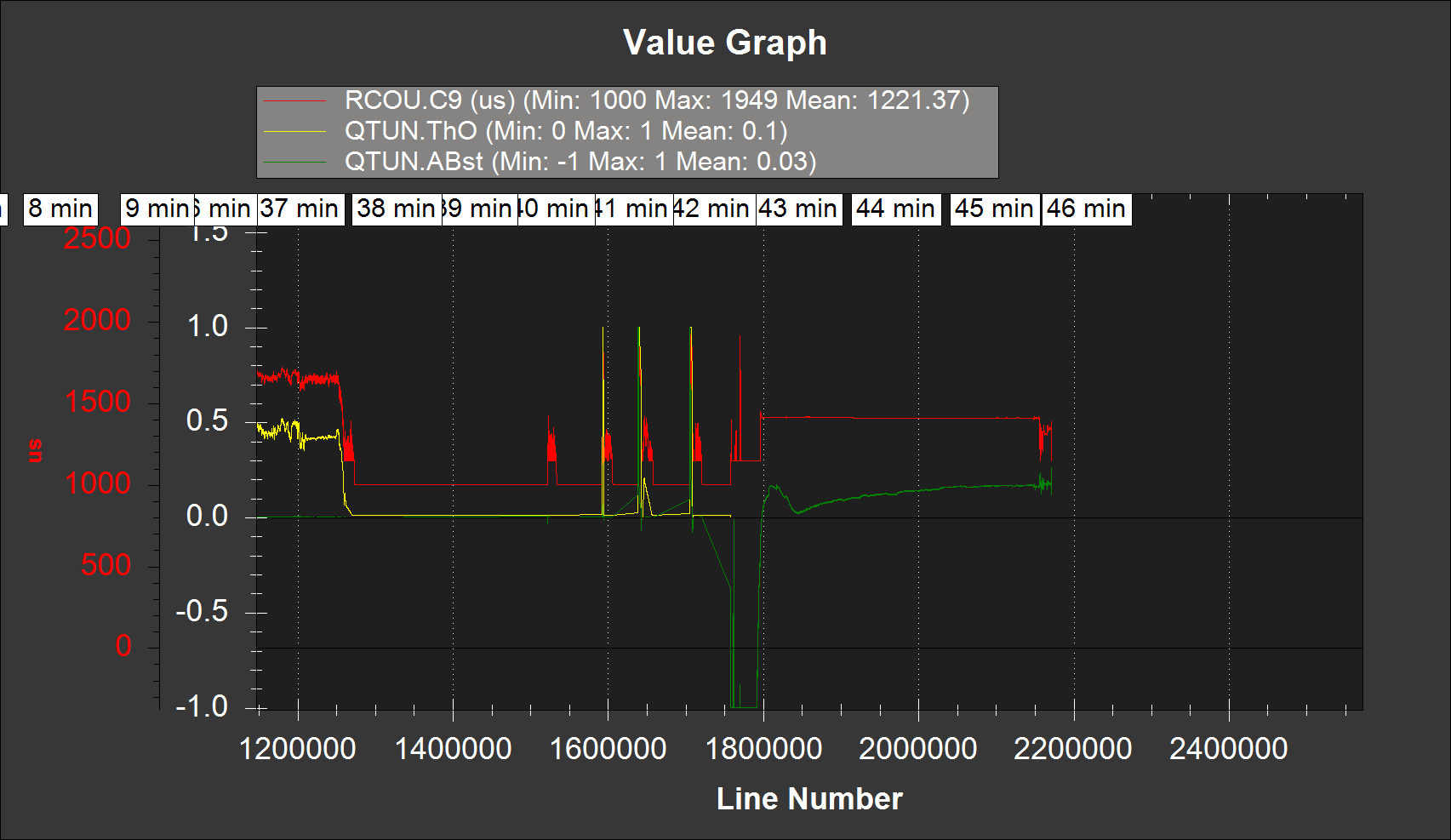
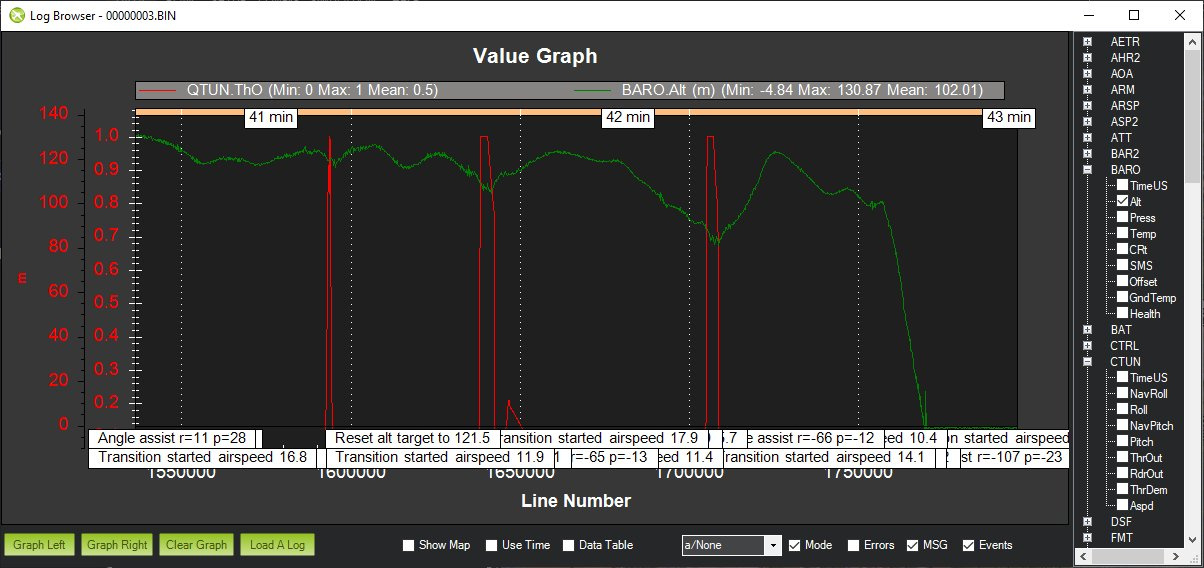
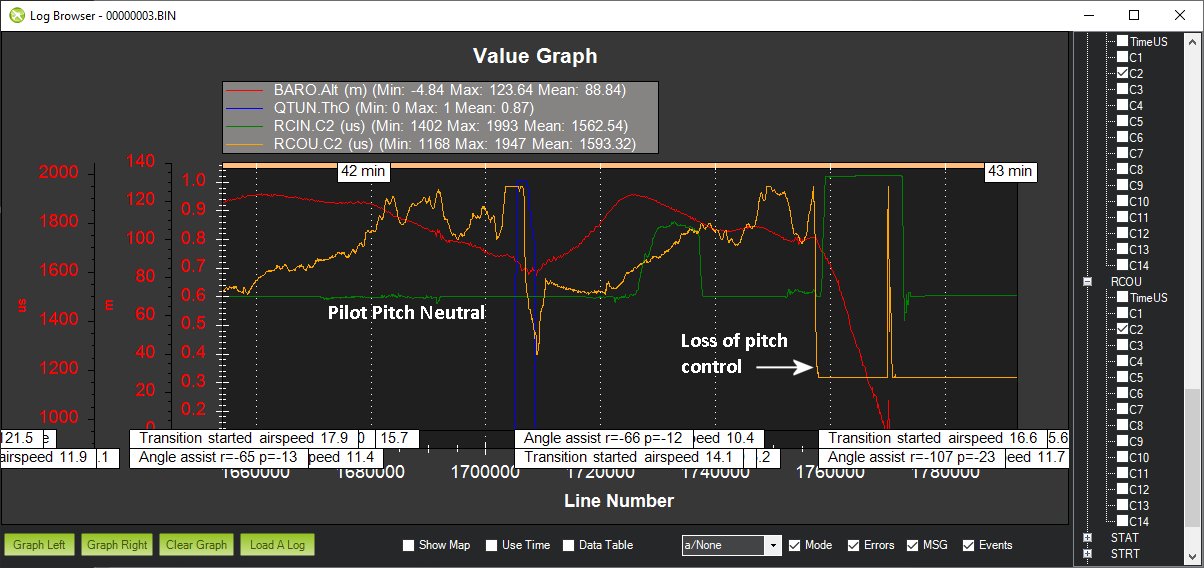
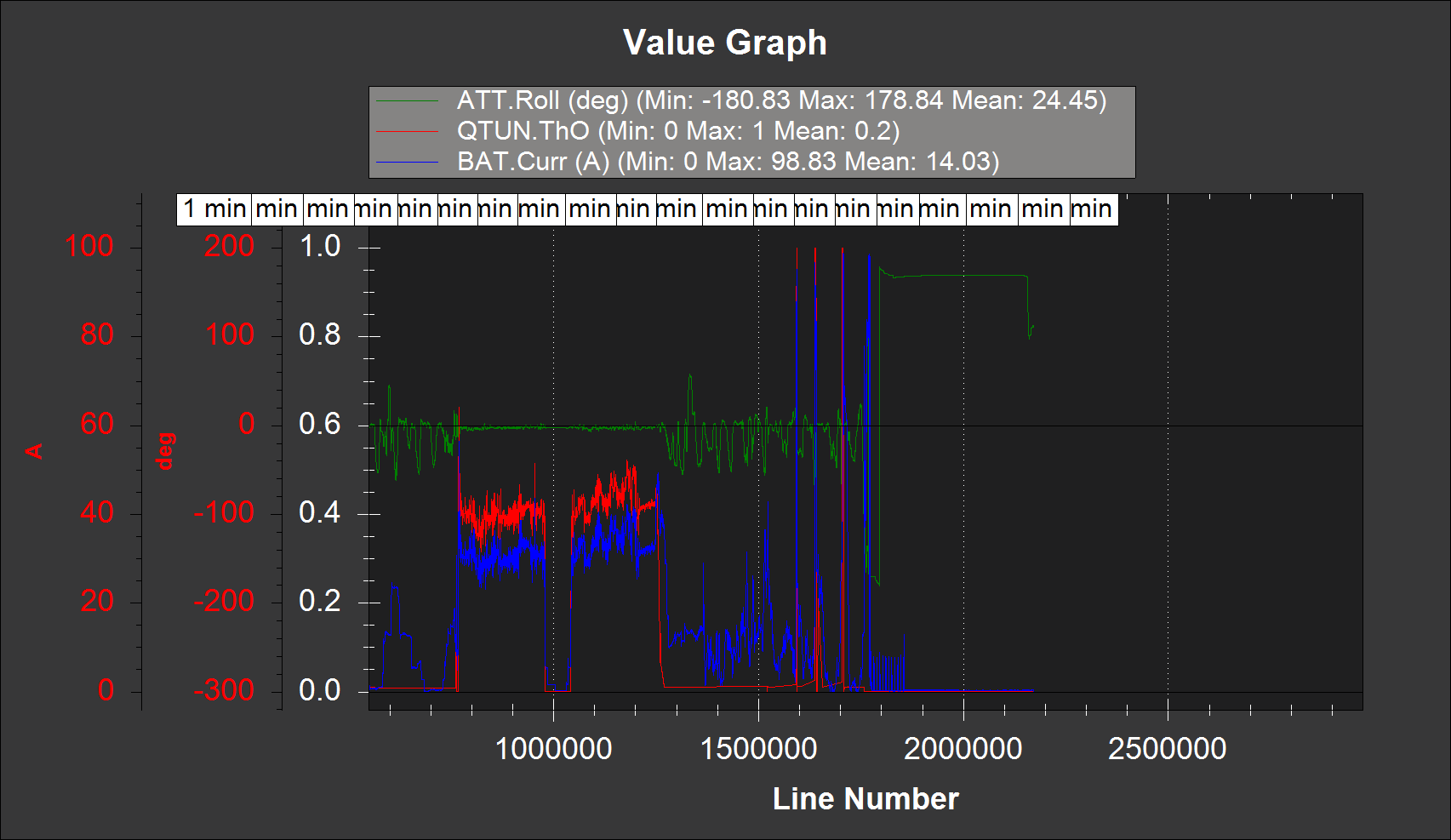
QTUN is a Quadplane vertical tuning message. QTUN.ThO is simply the throttle output enable for the quadplane motors. In the image below, the green QTUN.ThO is the third one in the sequence. The dashed white line should be where the 4th QTUN.ThO kicked in due to the angle assist event but there is nothing. At that point, control of the plane seemed to be lost.
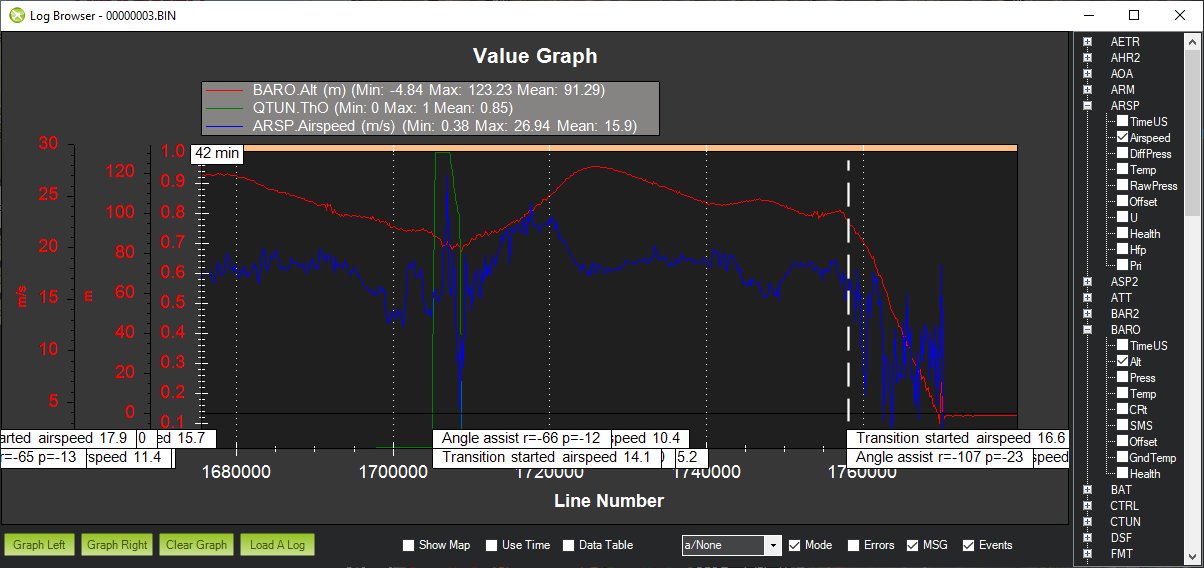
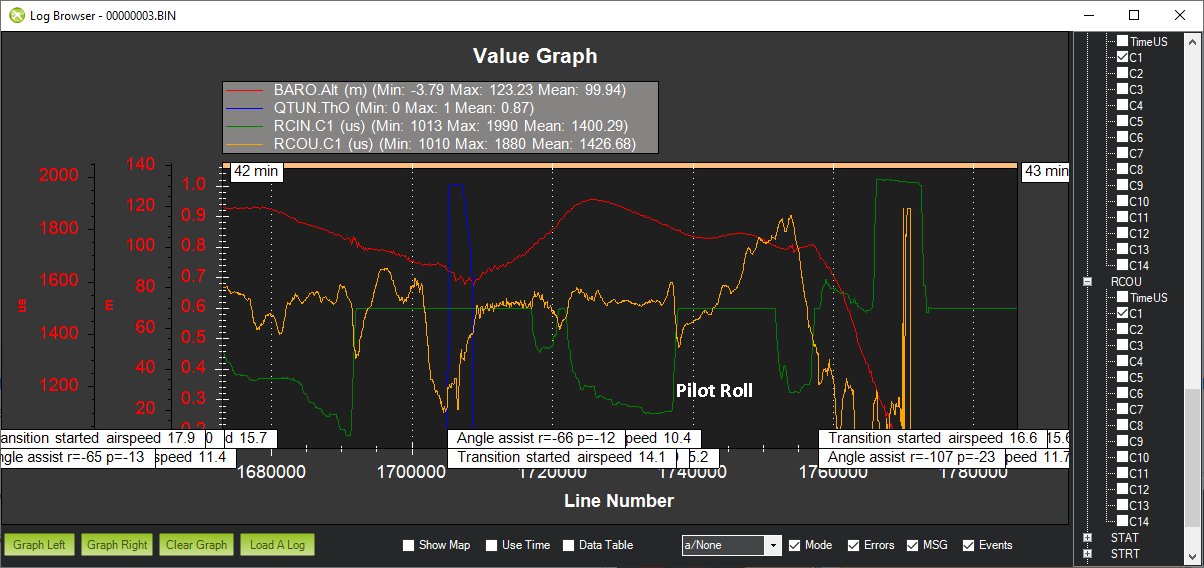
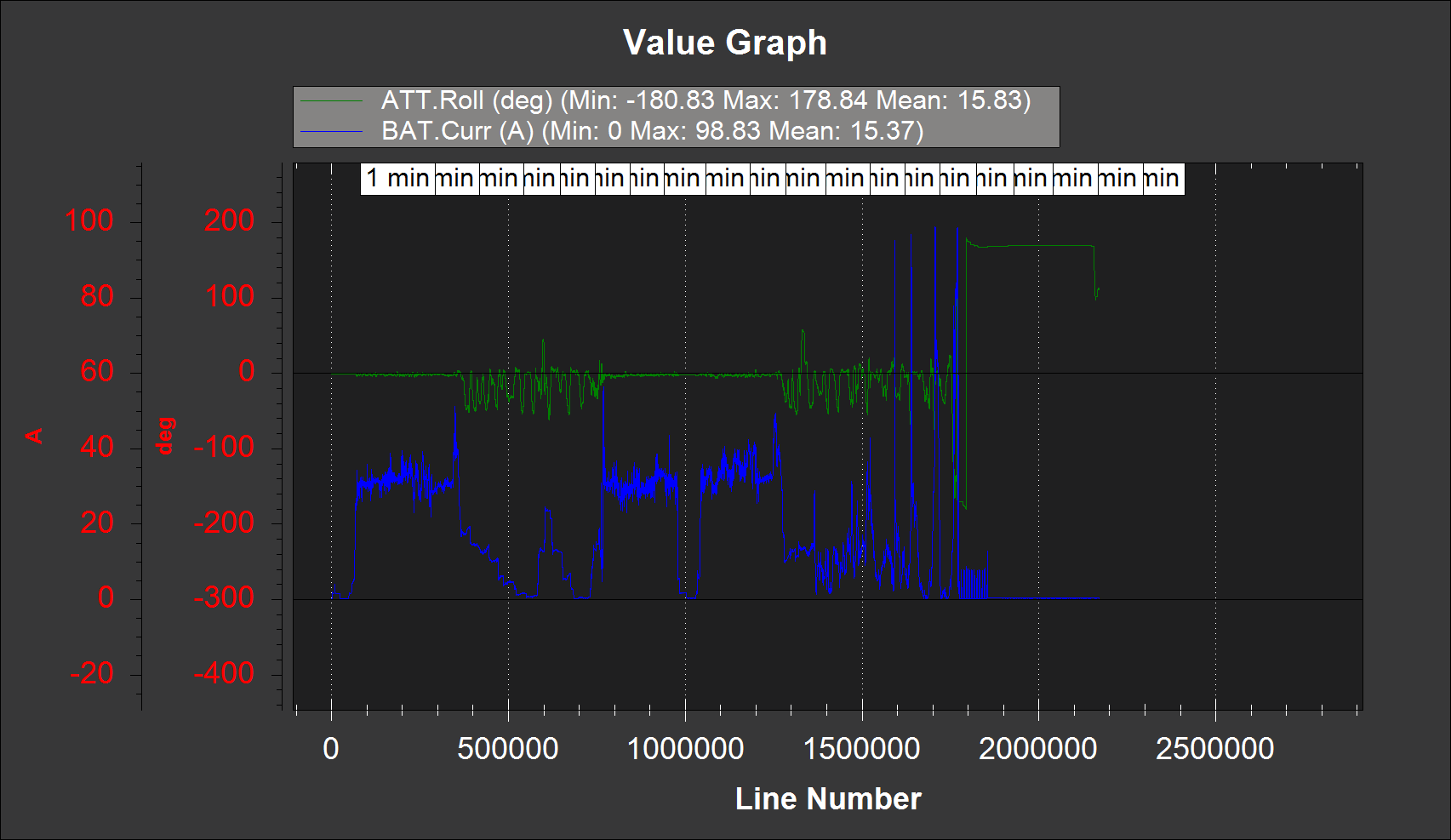
The first image below suggests a loss of pitch control. The second image shows that roll is still controlling until the crash. So did the elevator stop working or did the plane stall and the Q_ASSIST features fail to kick in?
I presume Q_ASSIST_ANGLE is the angle of ERROR, not the actual roll angle i.e.
if des.roll - roll > Q_ASSIST_ANGLE then assist = true.
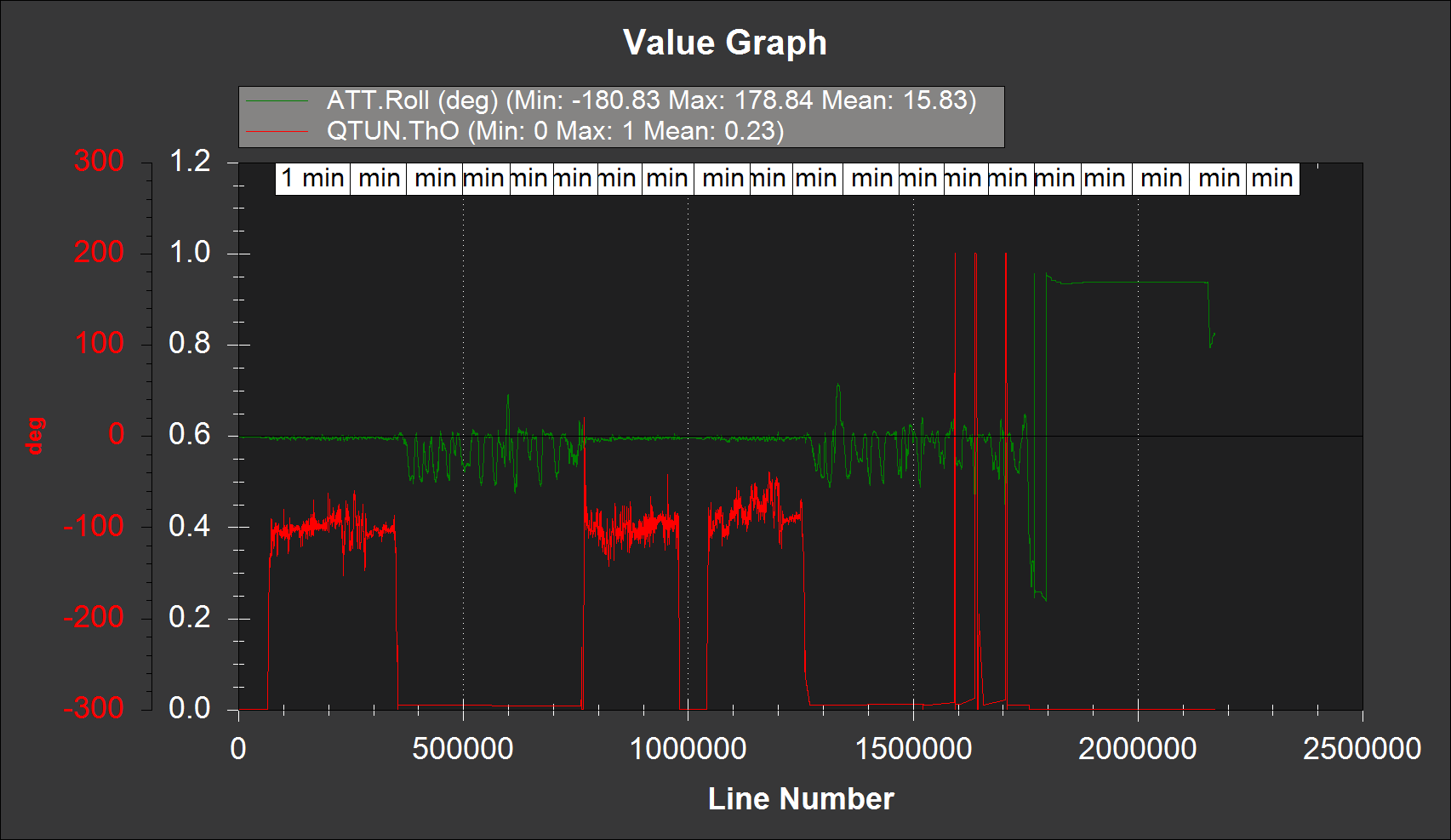
I was going to suggest that perhaps this was because the aircraft had banked over too far at this time, however this is not the case as at the time of first QTUN.Th0 roll was only 11 degrees.
The 3 spikes in QTUN.Th0 starting @ 1592519 is odd, and as you are suggesting, why no QTUN.Th0 at 1769985 when roll (error) is well beyond Q_ASSIST_ANGLE. Is this because it is WELL BEYOND, and the FC simply could not react to this very sudden error?
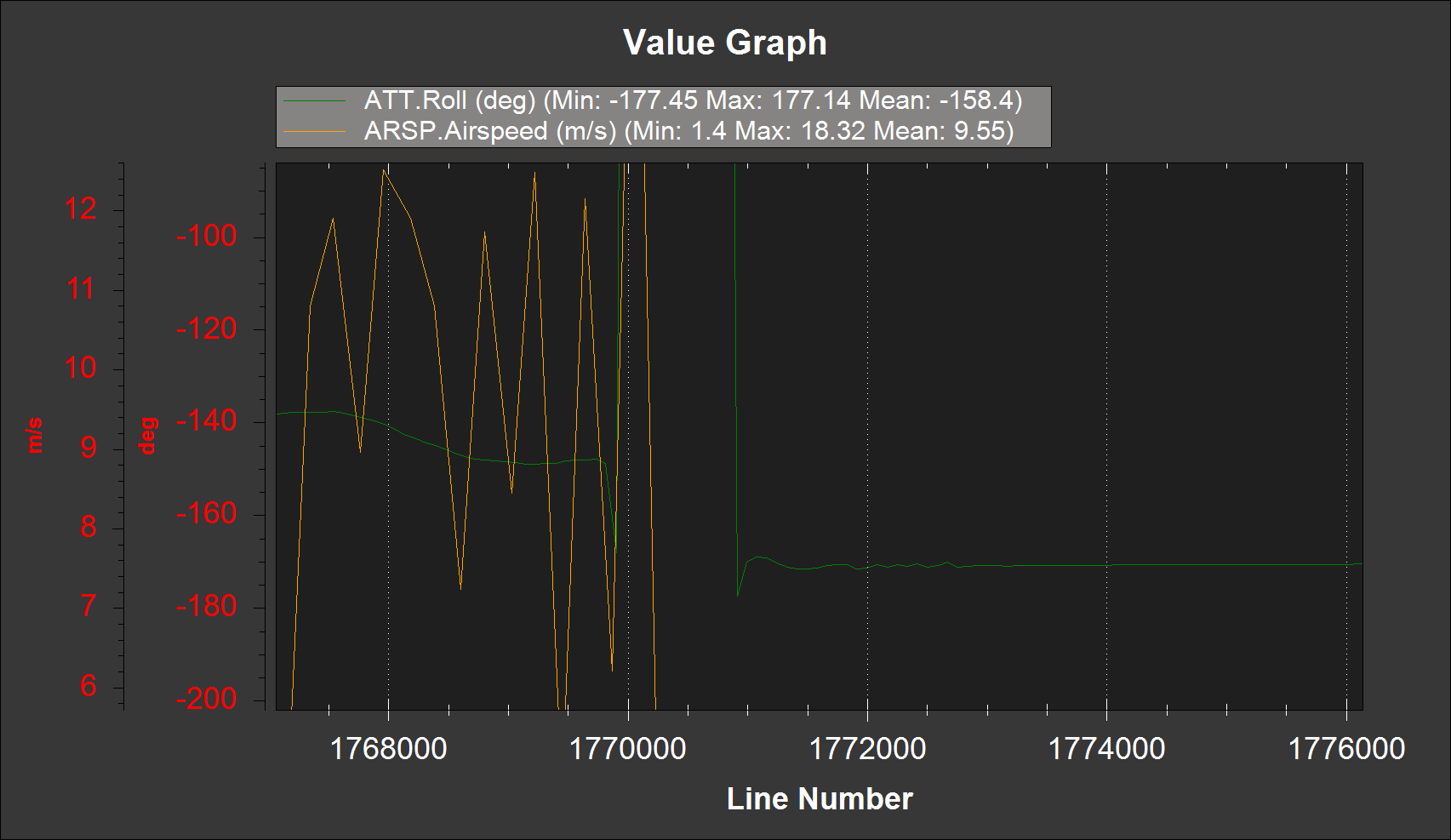
Still at a loss though to why such sudden banking, I have looked at the ailerons, and they appear functional, despite the crash.
Looking very closely at the point roll goes nuts, it looks as if airspeed jumps from 12 m/s to 6ms, but this could be noise.
From the Wiki:
Q_ASSIST_ANGLE is the angular error in attitude beyond which the quadplane VTOL motors will provide stability assistance. This will only be used if Q_ASSIST_SPEED is also non-zero. Assistance will be given if the attitude is outside the normal attitude limits by at least 5 degrees and the angular error in roll or pitch is greater than this angle for at least 1 second. Set to zero to disable angle assistance.
From the Release Notes:
Q_ASSIST_ANGLE for stall recovery - Another new quadplane feature is automatic recovery from fixed wing stall. Previously the VTOL motors would only provide assistance in fixed wing modes when the aircraft airspeed dropped below Q_ASSIST_SPEED. Some stalls can occur with higher airspeed however, and this can result in the aircraft losing attitude control without triggering a Q_ASSIST_SPEED recovery. A new parameter Q_ASSIST_ANGLE allows for automatic assistance when attitude control is lost, triggering when the attitude goes outside the defined roll and pitch limits and is more than Q_ASSIST_ANGLE degrees from the desired attitude.
Note that the full .param file can be obtained from the .bin file. In Mission Planner, select the “DataFlash Logs” tab and then press the “Create KML + gpx” button. Select your .bin file and the new files will be extracted from the .bin file into the same directory.
Sorry, have been in a Dev Void for months.
Not really to be honest. The VTOL stalled and flipped over. I did find the main Thrust ESC and one of the VTOL ESCs fried, but this could have been caused by the crash.
I wish I could have a more substantial understanding of the crash.

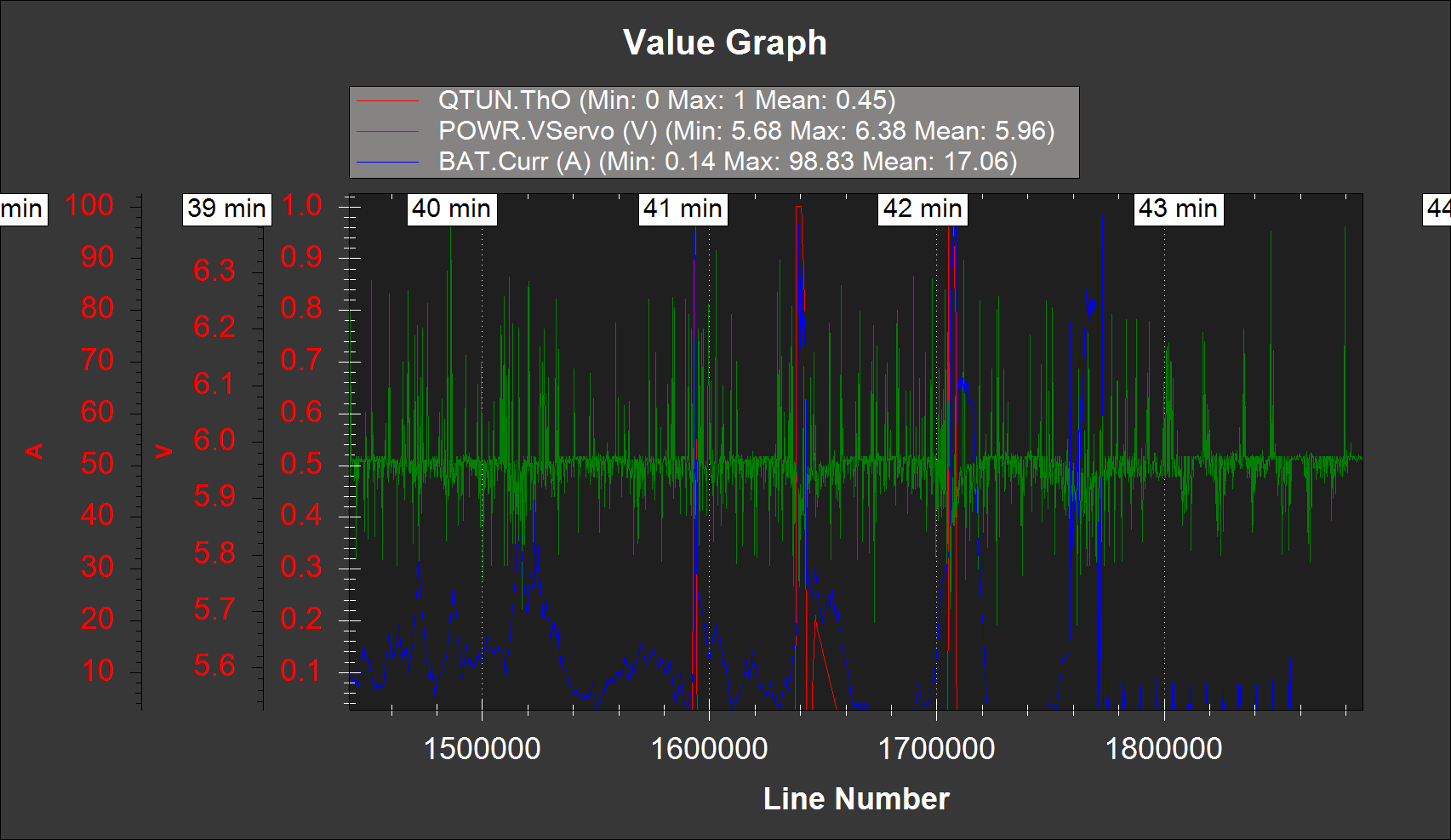
 : Sorry, my timing is all out of sync, the spikes are all the Q assist events. Im getting tired.
: Sorry, my timing is all out of sync, the spikes are all the Q assist events. Im getting tired.