So instead of fixing the fact that your aircraft might be underpowered - you would rather limit the control algorithm?
1 Like
i just feel the control algorithm is behaving suboptimally in my case. you can see from the logs that once the yaw issue is encountered, it goes into “crash mode”. after a hard landing, i can go about flying again. doesnt it seem that if the control algo just let go a bit on the yaw, i wouldnt have a sudden mandatory landing?
you cannot tell from the logs, but these issues happen when it is very windy outside. shouldnt the algo be forgiving, or must it impose mandatory landings when it is windy outside? a sudden gust could at any time take out my drone
If the issue is more prominent during wind - it just further dictates that your aircraft is underpowered. Instead of handicapping the control algorithm - why not fix the fact that your aircraft basically loses almost all yaw control during any aggressive maneuver or wind gust?
No there isn’t as much as I would like to tell you there is.
To put it in perspective that motor mixer is one of the single most complex and critical areas in the control code when you consider all the frame geometries and motor redundancy. Any change there needs to be done with a huge amount of care.
I have considered adding a limit on the output of the PID PD term. So a user could limit the output of yaw to say 50%.
None of this changes the fact this aircraft is only barely able to fly and is struggling all the time.
However. What if we had a high performance heavy lift aircraft that needed to fly at 150% of it’s normal payload capacity to save a life…
Perhaps stated another way: if we give up yaw control in favor of thrust, we can overcome SOME aspects of poor design and keep a brick airborne. But it becomes unpredictable. Is it ok to lose yaw control during an aggressive maneuver? Or just a catastrophic descent? How do we determine/detect when we “give up” yaw control safely? Or do we always just limit yaw when thrust is a priority, thus making control questionable? I think the answer is…we can’t safely prioritize in that way.
1 Like
well, from the bin files you can see that i fly quite a while in windy weather without clipping the vast majority of time. its my opinion that if yaw wasnt forced over throttle, i wouldnt crash, and could continue flying well within limits.
is it not acceptable to occasionally clip?
but i digress. it would be best to increase yaw authority.
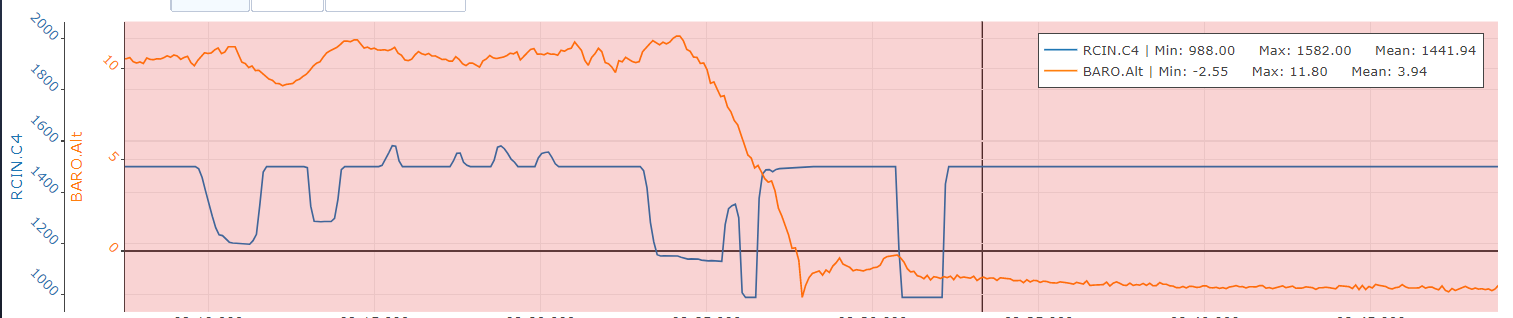
hmm? most of the flight the average signal is below 1500
You may find that adding a 3 or 5 degree cant to the motors (like they do with larger aircraft) may be a “quick fix” for your issue.
haha already did. how bout 10? ![]()
Oh geez - I personally would not go above 5.
But go ahead and have some fun with it and see what happens at 10+.
well, i would think being able to gracefully handle large impulse would be part of good design. the vast majority of time my aircraft is below 1500 (average) signal.
When the only means of stabilization is thrust, it is never acceptable to saturate the control mechanism.
edit: this is not meant to offend! just thought it was a funny meme.
99% of this forum:
1 Like
Also - I looked deeper into the logs. It looks like you lose control at a 45deg pitch angle. Your pitch tune (and probably roll) is also not that good.
I also see that you commanded max yaw rate (full yaw stick) during the descent - which even further caused the two motors to max out (and the other two to go to min).
Maybe restricting your max yaw speed/acceleration will help here?
Maybe I am mistaken here - but I honestly think if you didn’t touch the sticks controlling attitude at all and just throttled up (ideally in stabilize mode) you would have been able to save the aircraft.
Edit: Your max yaw rate parameter is also set to 0 - which means its just going to command the fastest yaw possible (I think).
that sounds like a good suggestion, if my max yaw rate command triggered the descent somehow. note that i did not command yaw during the descent, or at least the start. the yaw command at the end was during the final part of the descent and was probably panic. looks like it didnt change anything.
at any rate, i dont think i meant to command max yaw rate.
Please see my edit to last comment. I do not recommend having this parameter set to 0.
1 Like
As I said:
And that means 84% at minimum battery voltage.
I am not giving you my opinion here, I am telling you what you have.
Yes it is, but the vast majority of aircraft only clip on the low side in normal flight unless they are carrying a heavy payload or doing aggressive maneuvers.
Ok, this is crazy. There is no way this is done right. I suspect you may have twisted the arms the wrong way or misunderstood the statement. That would explain the yaw behaviour.
A little over stated. Perhaps “saturation should be minimised”.
@lordvon you are risking being considered rude here. I would suggest you treat the people who have taken the time to help you with the appreciation they deserve or you may find much less help forthcoming in the future. Based on what I see here, you will need these peoples help.
oh, wasnt trying to be rude at all. thought it was a funny meme. apologies for any offense! I greatly appreciate the help here.
2 Likes