Hello everyone,
I have recentely faced a problem with my new copter. It is about a control of the motors when voltage is higher than 14 volts. With this voltage my motors react on the throttle strangely. It does not rotate with its full speed at the full throttle, though its speed is increasing untill the throttle is about half way. I have tried to put a high voltage on a different controller with same software and it worked because the controller depicted 13.6 as input voltage(pixhawk cube V2). Therefore, the question is:
Is there anything(hardware or software) blocking the voltage? And if yes, how can I remove it?
Also, I don’t understand what is happening with the logs, I have 7 A when the voltage is 16 V and more than 10 A when the voltage is 14 V.
I have tried to change the software of ESCs to oneshot, 150dshot pwm and some others. My ESCs are bheli32. Controller is Pixhawk cube V5.
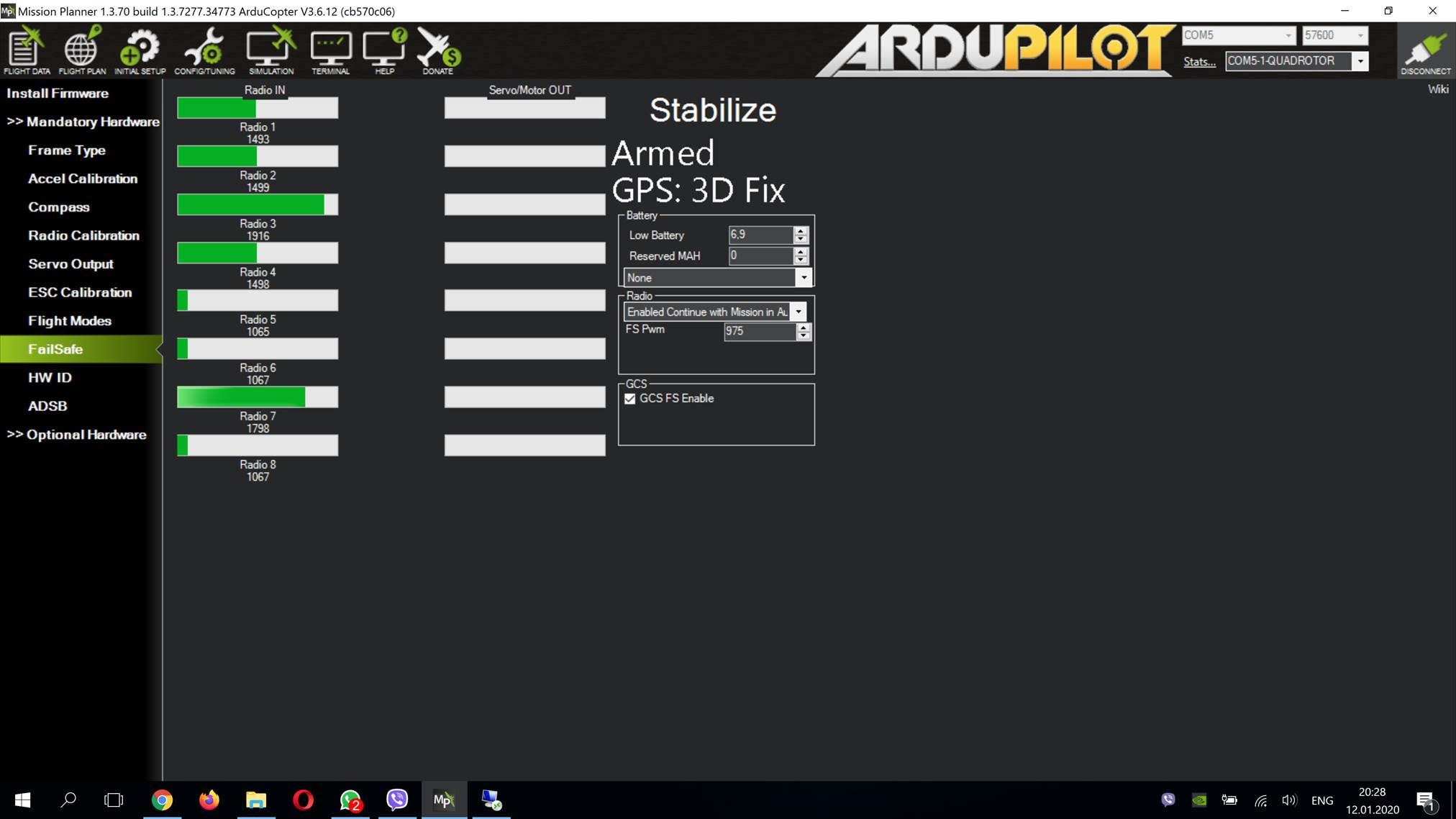
As well, I cant check my Servo motor out on the failsafe folder, so I can’t check if that is the problem.
How can I make it work?
@Sergey_S - Welcome to the forum! I am really not sure where to start with your inquiry but let’s start with the basics. First, please provide a .bin file, it will be more useful. Also, can you tell us a little bit about your setup? Battery, motors, props, frame size and weight. What voltage/current sensor are you using and has it been calibrated? How is the copter acting strangely when the battery is above 16 volts?
Regarding “voltage blocking”, the speed of your motors is not controlled with voltage, but the signal from your ESCs (Electronic Speed Controllers), which are driven from the flight controller. The flight controller responds to your requests for throttle, pitch, yaw etc and drives the motors to maintain stable flight.
The power consumed by the motors should remain relatively constant with the same throttle level and load. Power is calculated by multiplying the voltage x current.
As your batteries are depleted and the voltage drops, the amount of current consumed will increase. In your case, you are consuming about 112 watts with a fully charged battery and about 140 watts as the battery is depleted. In short, as you battery is depleted you will consume more current for a given voltage.
I think you need to tune your drone, I had the same thing with high kV motors. The drone was shaking but the further the voltage dropped the drone moved smoother. This is because of the high kV numbers. At high voltage a small increase results in a big change of speed with high kV motors.
I had a 250mm quad running with 2200kV motors at 3S. To stop the shaking I reduced the P Term by halve and started from there.
It takes a certain amount of power to get your quad to fly.
In the Direct Current (DC) world, Power in Watts is equal to the Voltage applied multiplied by the Current being drawn.
The voltage decrease is an inherent behavior of a LiPo battery that is under load. To keep the Power constant, as the voltage drops the current draw MUST increase.
The P term is one of the three values that are used by aPID controller.