Hello Everyone!
I am working on precision landning using below link.
Installation
First ensure the above dependencies are already installed.
There are two main components:
vision_landing, a python script
track_targets, a c++ program
track_targets must be compiled and installed into the main directory before vision_landing can be run. vision_landing calls track_targets to do the actual target detection and vector calculations.
git clone https://github.com/goodrobots/vision_landing
cd vision_landing/src
cmake . && make && make install
You should now have a track_targets file in the same directory as the vision_landing script (the root of the vision_landing project).
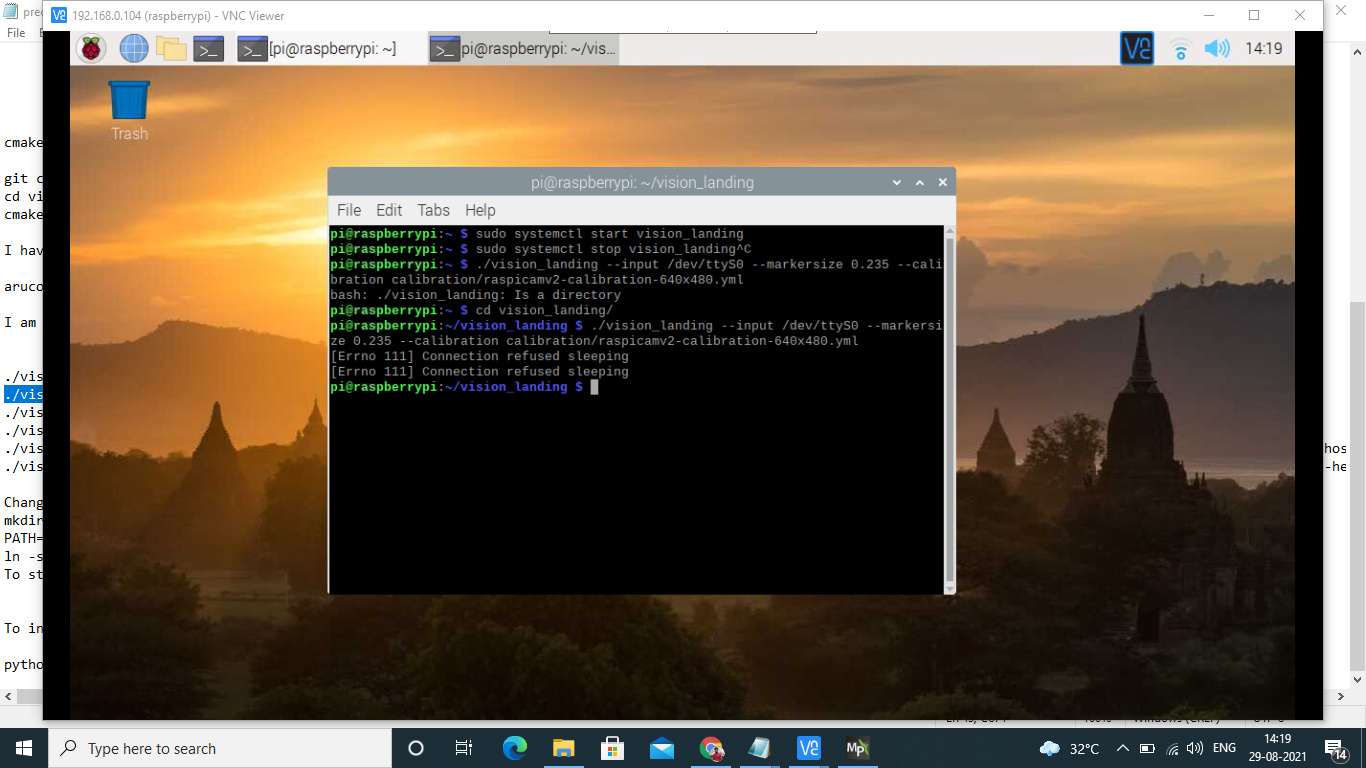
I have completed upto this. In terminal in which directory should I run below command?
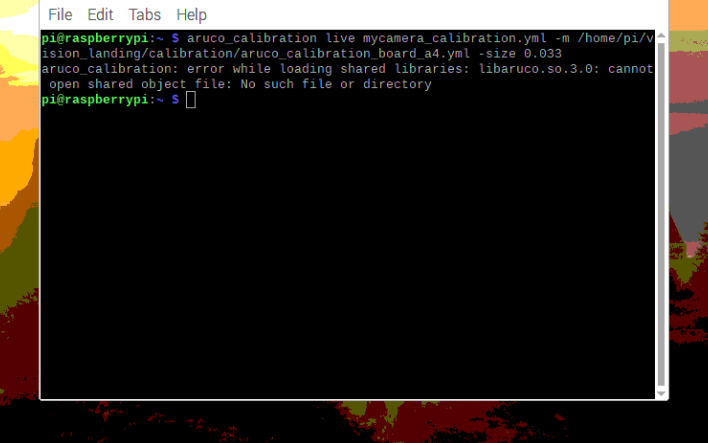
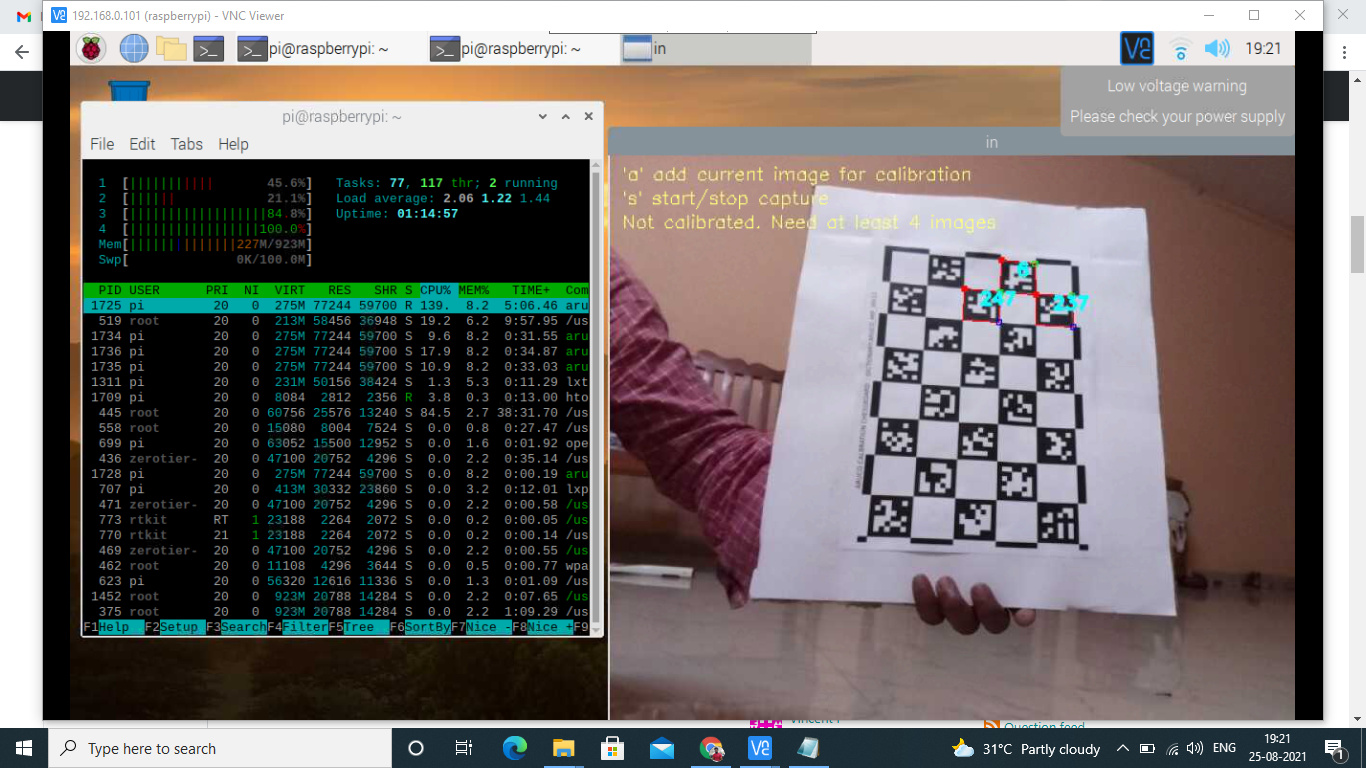
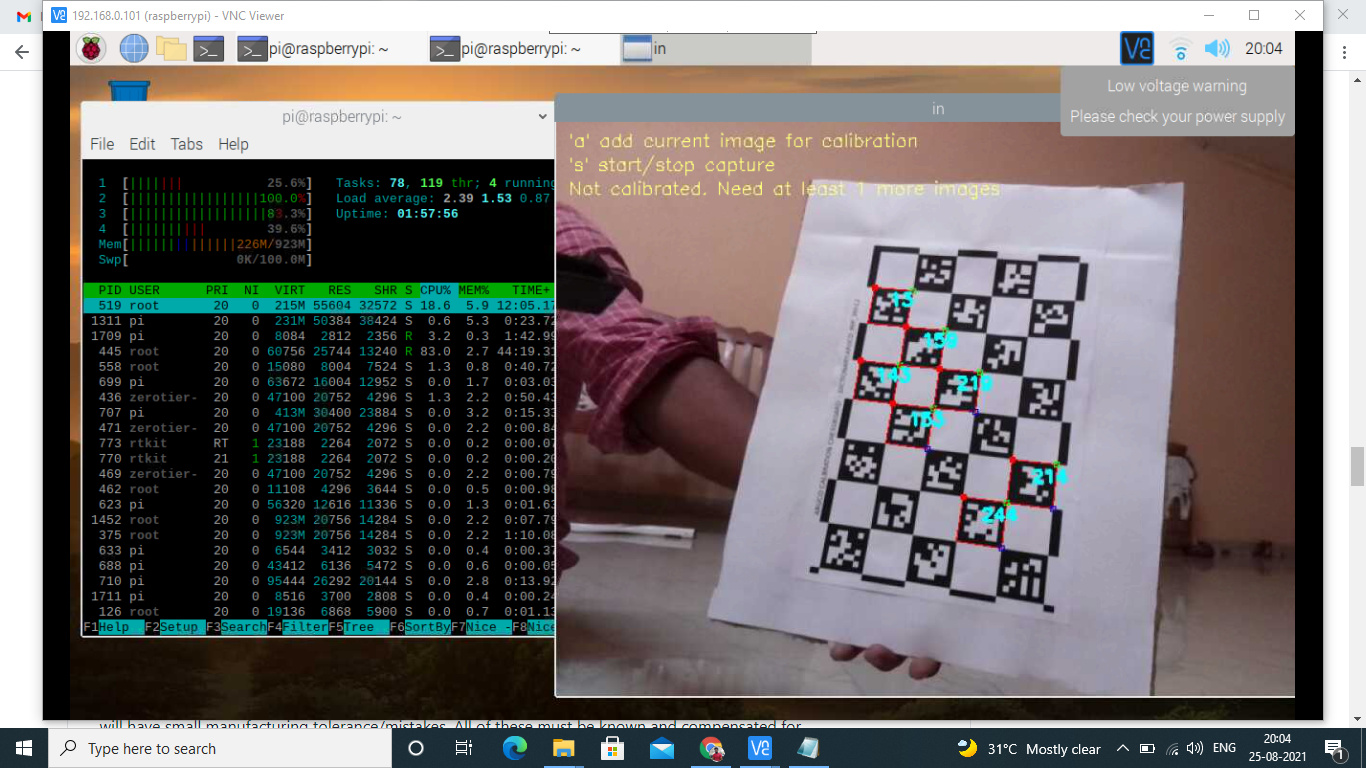
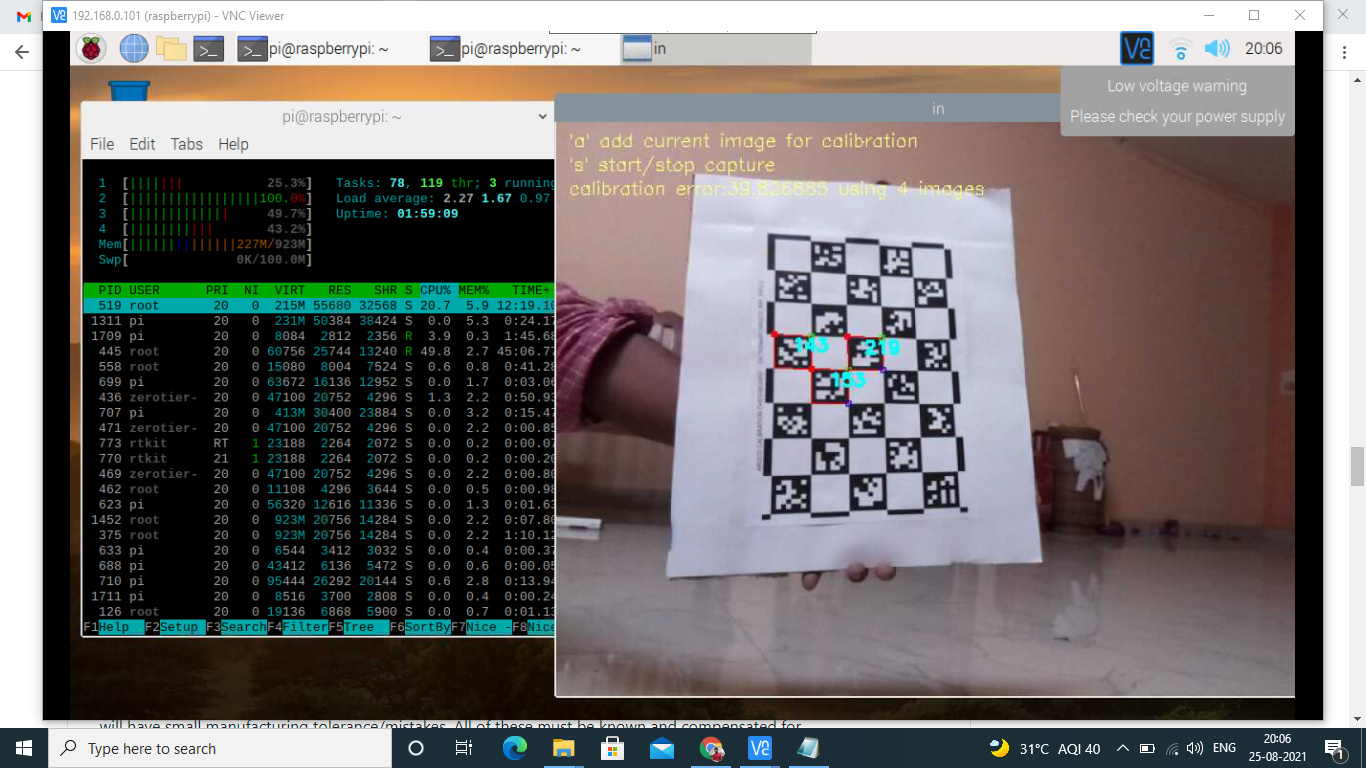
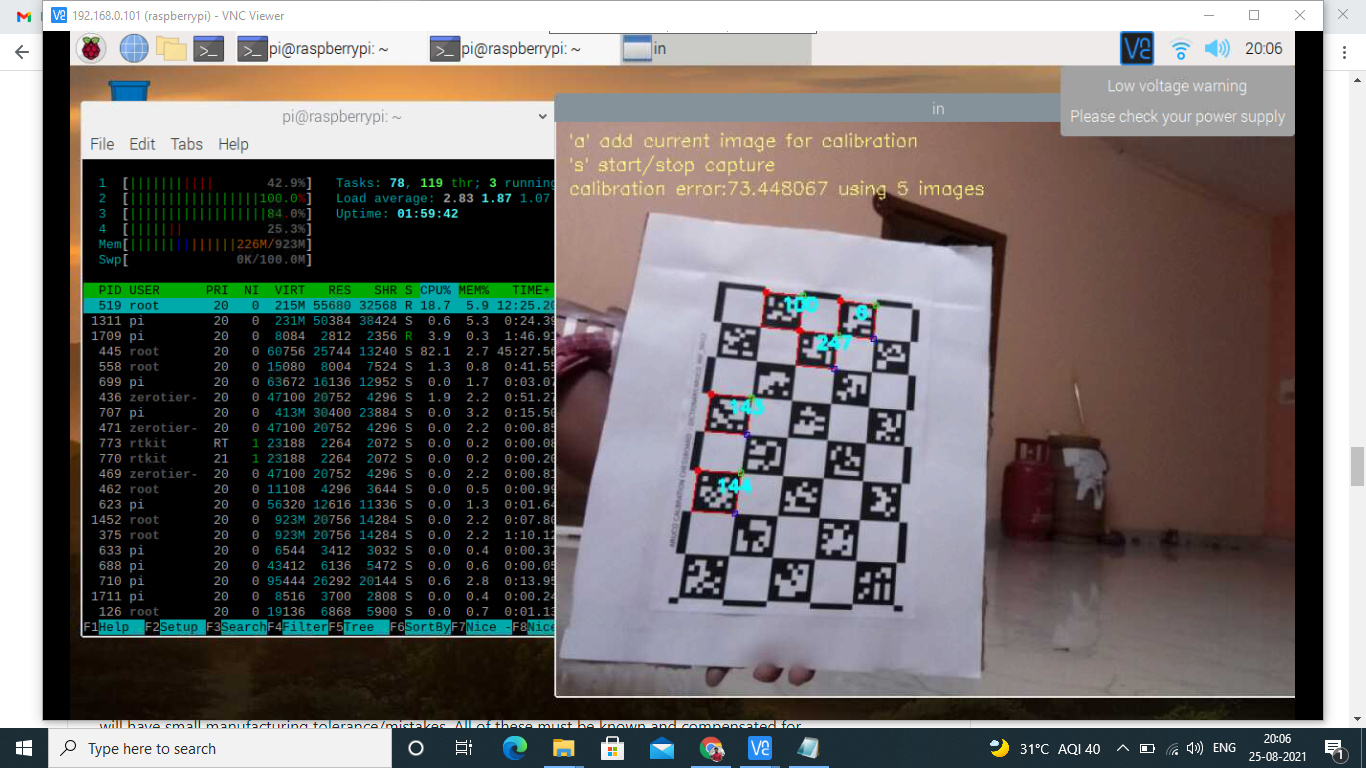
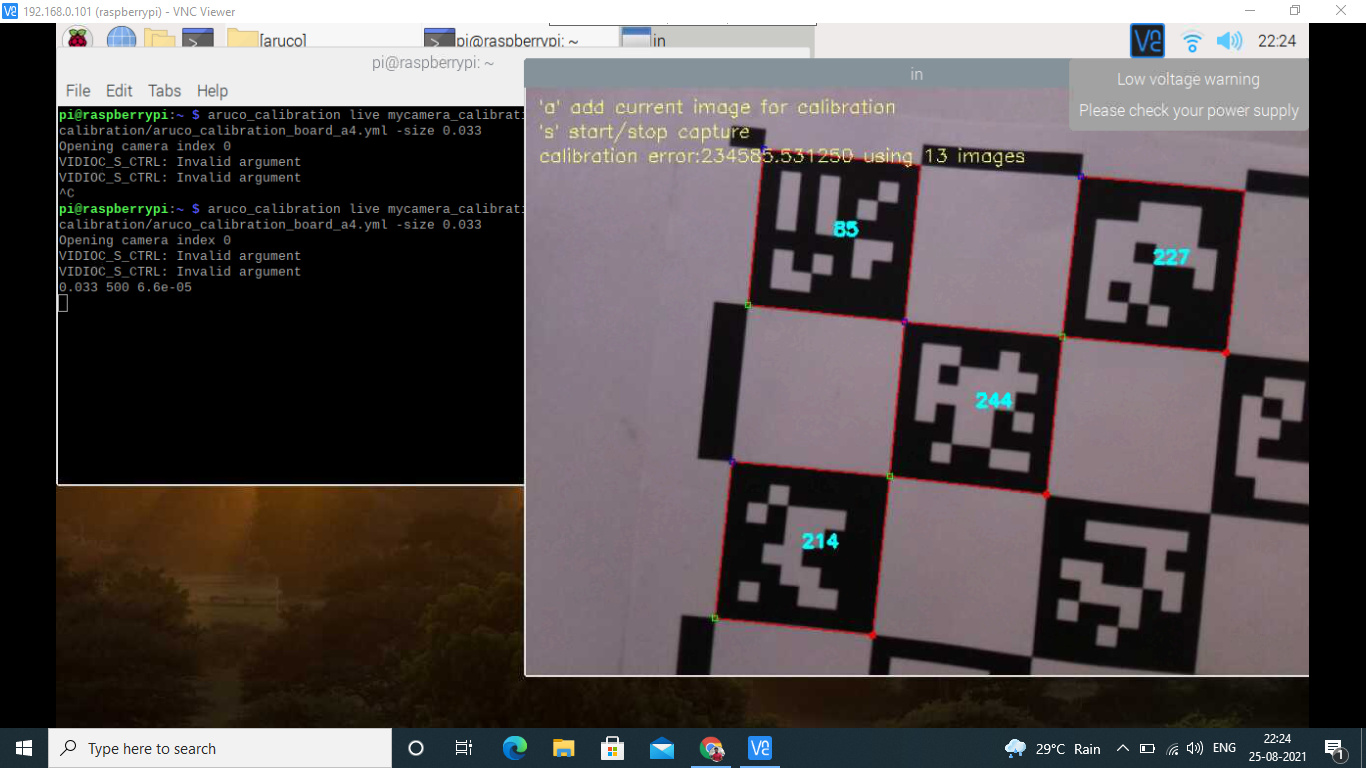
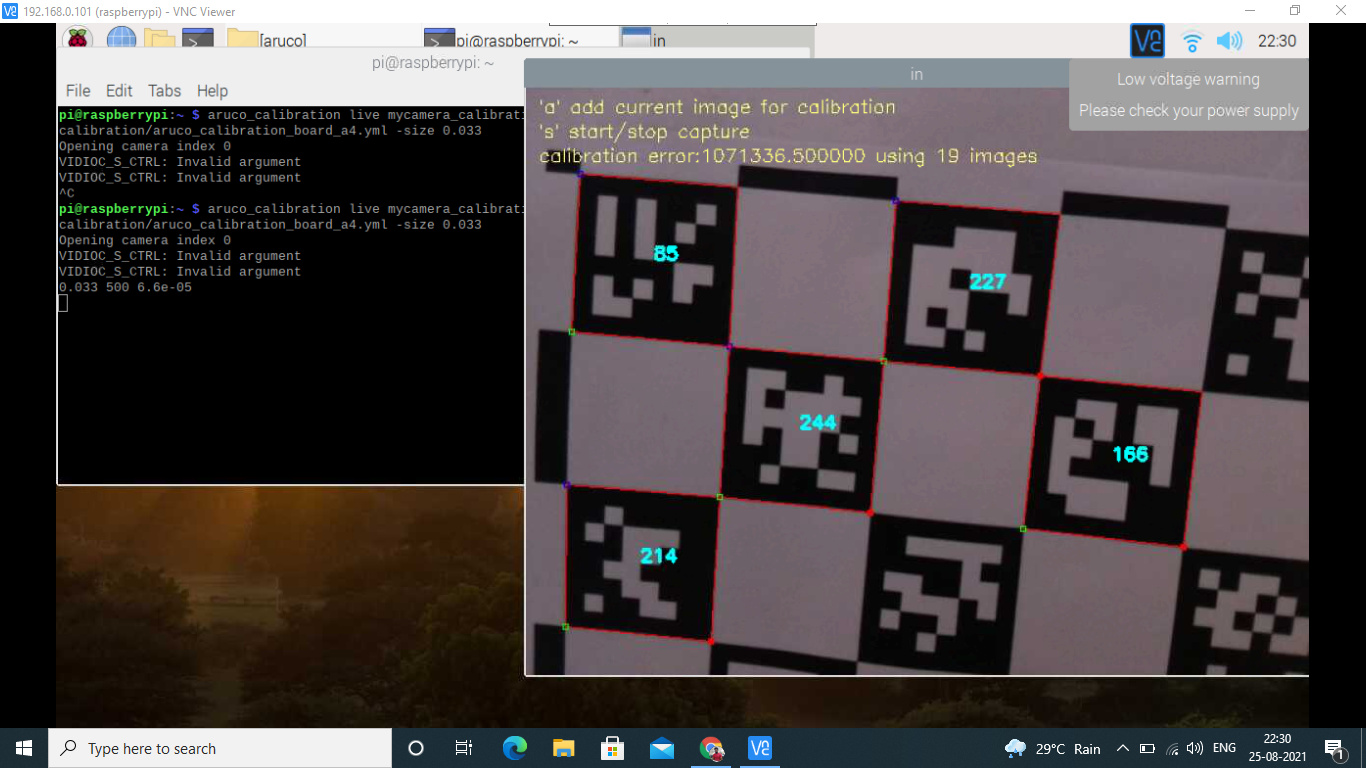
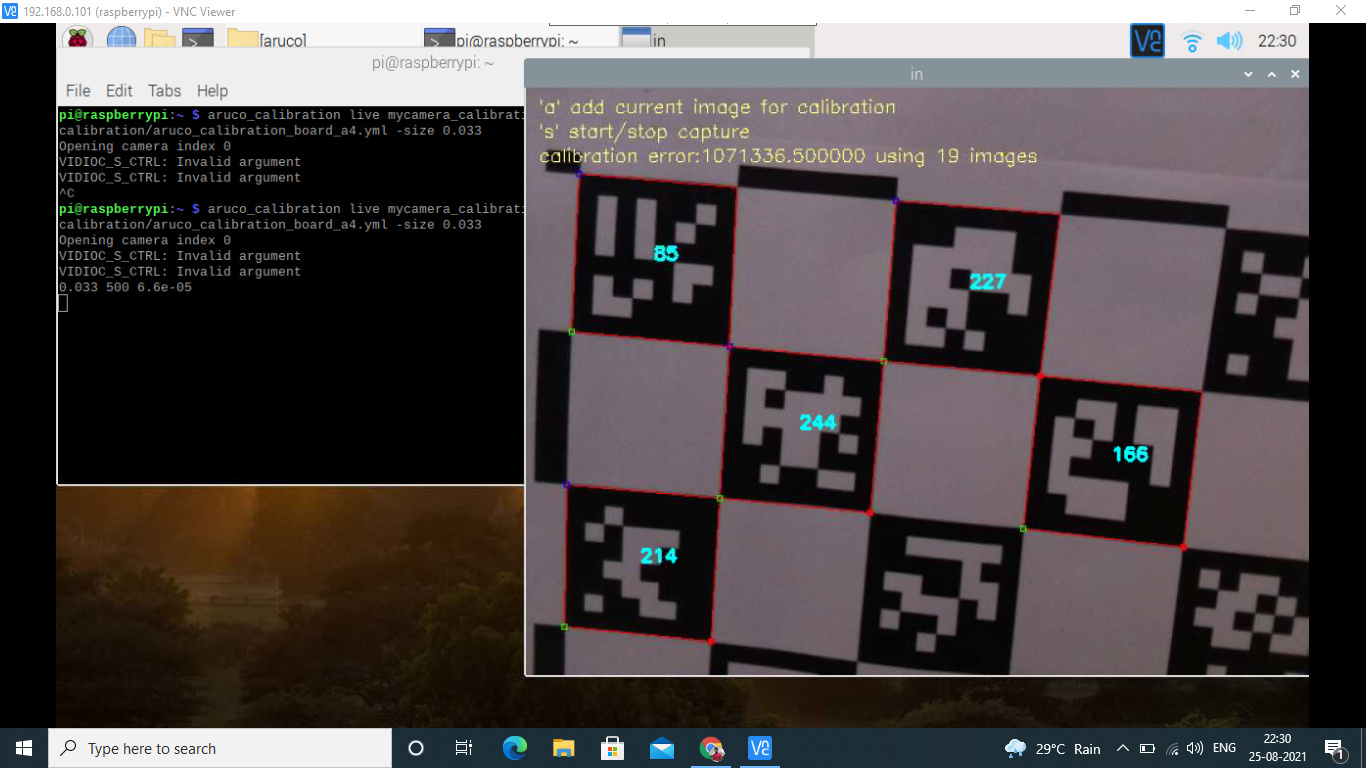
aruco_calibration live mycamera_calibration.yml -m vision_landing/calibration/aruco_calibration_board_a4.yml -size 0.033
Hi, Thanks for the quick reply.
Sorry, I am not good at coding stuff. I am new to this. Learning it online. So if I ask anything silly pardon me.
I have done as follows;
Installed aruco using cmake
Downloaded OpenCV from a github account and extracted
Tested the camera using OpenCV
Installed dronekit
Installed vision landing
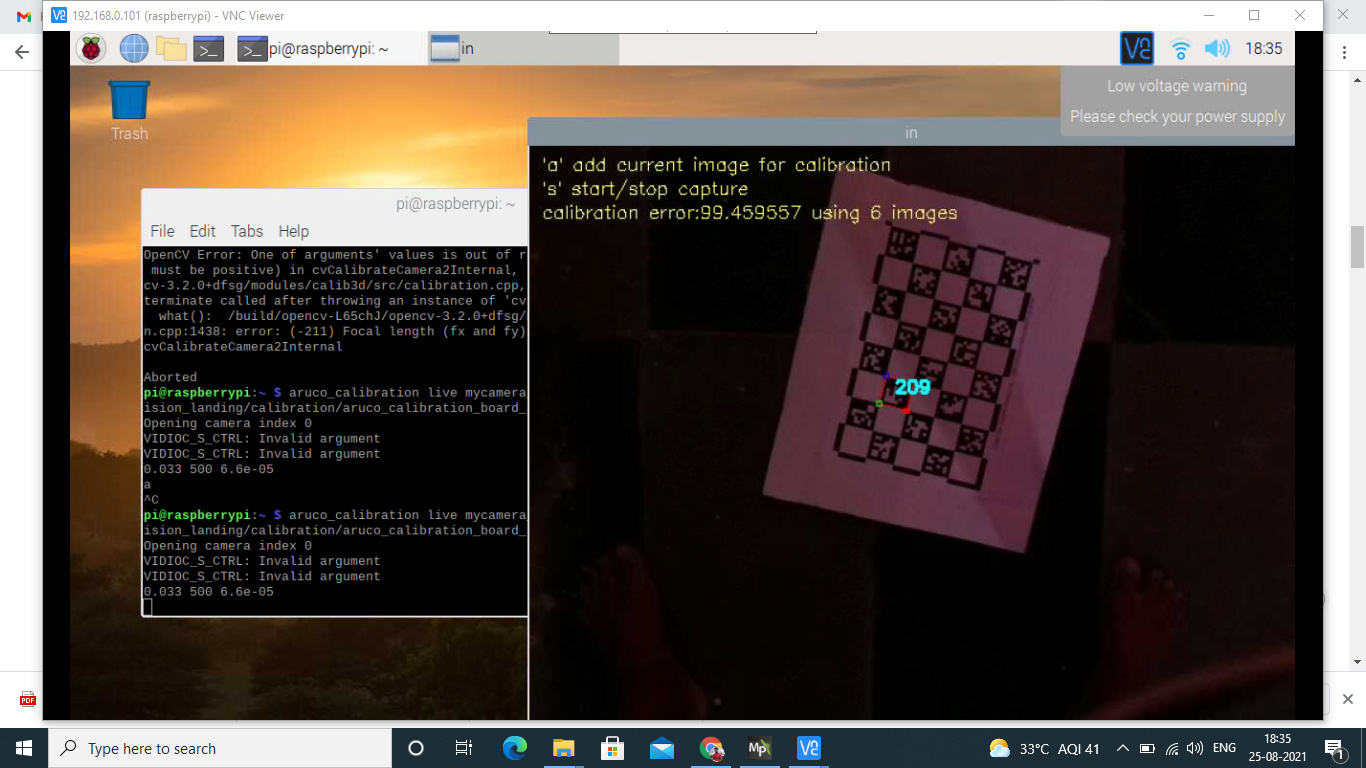
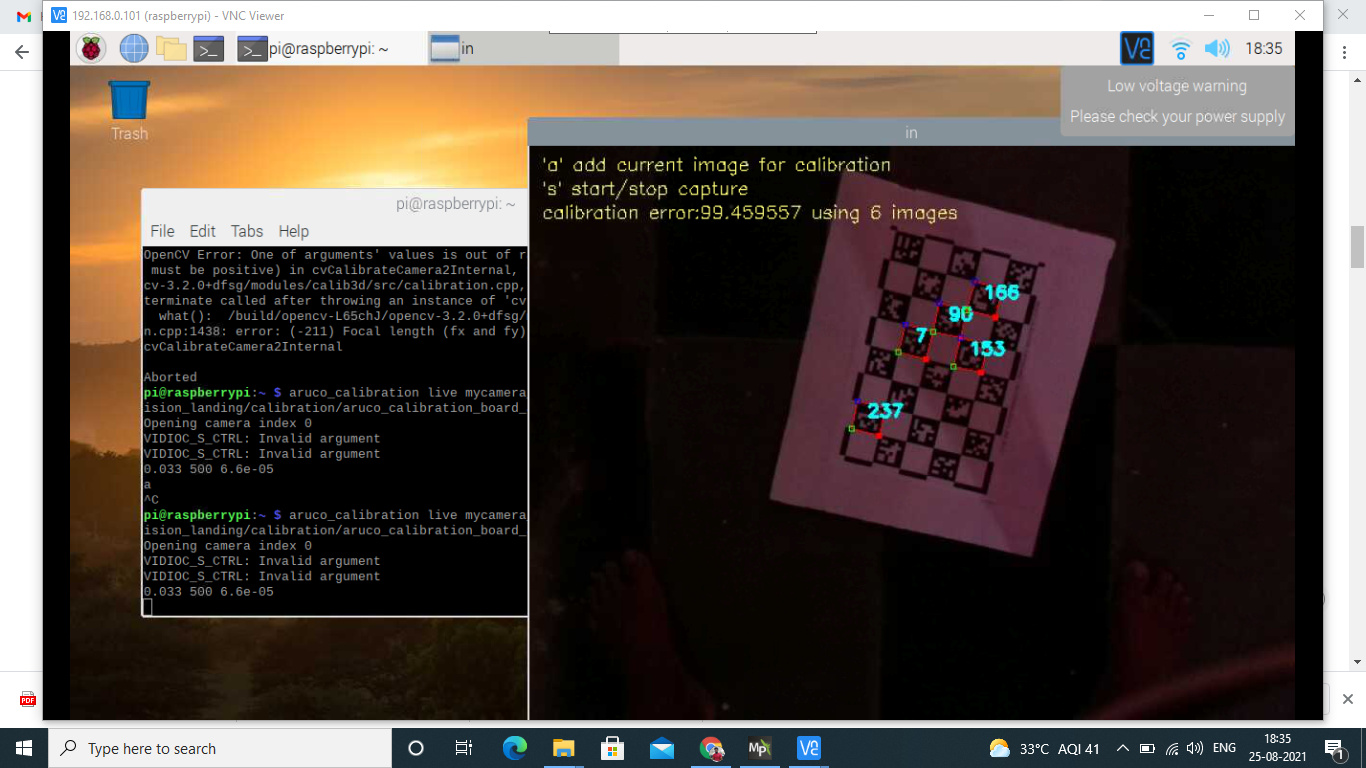
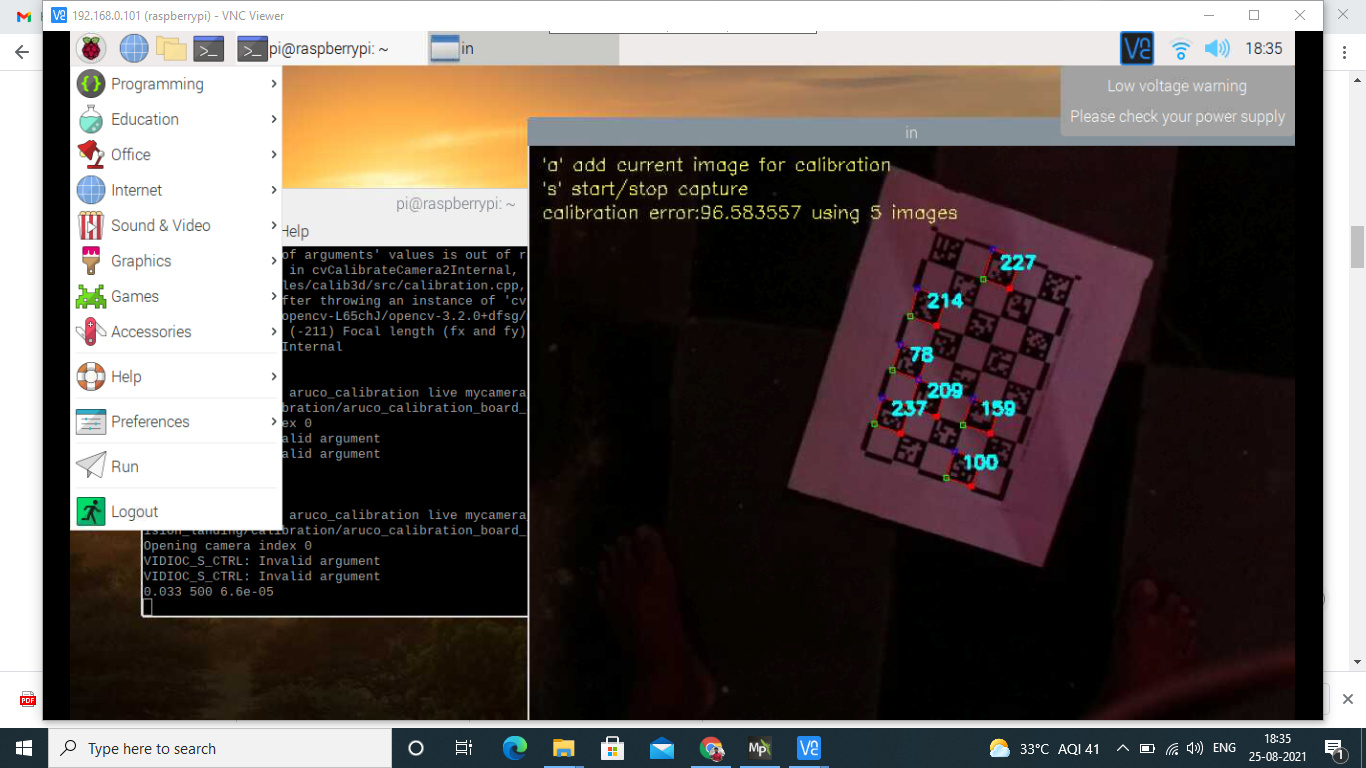
Now I am stuck in camera calibration command
I don’t know where to put those command;
aruco_calibration live mycamera_calibration.yml -m vision_landing/calibration/aruco_calibration_board_a4.yml -size 0.033
Same answer as earlier… the command does not find the libaruco.so.3.0 library (that is a Shared Object type). It is either not located in the $PATH environment variable or it has a different name.
What camera are you using? If you’re using the standard raspberry cameras - v1 or v2 - you don’t really need to calibrate as vision_landing provides calibration files already.
Hey ppoirier, nice to see you’re still alive and droning


{kind=link}