So I’m building big gas heli (tandem).
When I do power up with engine off, I am able to arm it.
When I try it with engine on, pixhawk gives me blue/red light blinking, which according to manual means “Initializing gyroscopes”.
I think this is because my engine vibrates too much.
I cannot reduce vibrations, such is my engine, I will have to live with it.
Question: what settings do I need to change to accept high vibration levels?
Accepting high vibration levels = Accepting crashes
…you are essentially overloading the gyros to a point where they can’t do their job = crash.
Besides commercial vibration dampers of all sorts and sizes, there is also the possibility to make some mounting dampers up yourself if you happen to have access to a 3D printer and using the flex/bendy type of materials.
I myself helped a friend with a commercial grade fan which suffered frequently failure of a bearing bush due to high vibrations. Every time a rather expensive repair kit had to be ordered just to get a new bearing bush assembly. → Solution: Made a flexible bearing bush myself on my 3D printer and it has been in use now for over 4 years. (Original once failed about every 6 months).
There are quite a few ic powered autonomous heli designs around that have managed to reduce engine vibration / flight controller vibration enough to allow accelerometers to function properly, i say you dont just have to live with it but instead look for ways to reduce the airframe vibration and or isolate the fc from the airframe.
OK, so it all comes down to mechanical vibration isolation?
I will definitely do that.
I was wondering if there are other settings (filters, thresholds, etc.) that I might tweak as well?
It’s almost entirely a mechanical solution. Tidy the wiring, specifically anything loose that is connected to the autopilot itself. Secure any loose components. Balance your rotors extremely well. See if there’s a way to mount the engine on more compliant motor mounts.
After all that, if you still have unacceptable vibration levels, try a softer autopilot mount like this one that I made today for use on a very noisy lawnmower. But this should not be your first solution…
To better answer your question regarding software solutions - you have a hardware problem at present. The filters are almost entirely frequency based (not amplitude). Reduce the amplitude as much as possible with physical mitigations, and then we can assess how best to filter the remaining noise.
I’ve tried the arrangement that Yuri is showing, but in my case it made things worse. After a few different tests with different materials I’ve settled for the supplied foam pads.
…But in the past other things worked better when using a different FC.
→ So sometimes there is no “out of the box” fix but you’ll have try and find what works best for you.
Any of these simple “damping” mechanisms (including the Cube’s own internal system) can exhibit poor behavior at certain frequencies. They will naturally resonate at some frequency and harmonics thereof, and if your vehicle produces vibrations at or near those frequencies, the damping mechanism itself becomes counterproductive. I’ve also experienced a case where a multirotor’s response was over-damped, causing undesirable (and nearly un-tuneable) behavior. Hence, I mention damping mounts as a last resort rather than a first step.
Through simple (but likely tedious) experimentation, you could use a mount like the one I shared as a baseline and then “squish” varying thicknesses (or styles) of foam between the top and bottom plates to vary the response. You could even try filling the little silicone ball mounts with thick grease or RTV to get yet another response profile.
Yes, agree with Yuri, just have to spend some time and test different products and mounts until you get the best results.
Over the years all sort of things have been successfully used: Foam tape from hardware, eBay or other sources. Foam from packaging of sensitive freight. Springs of various length and strength. Rubber bands suspending equipment like FC’s or motors. (Seen similar arranged to Yuri’s earlier post but suspended with rubber bands.) Rubber grommets…
There are also some commercial dampers you can get for motors,…and the list goes on.
If you have a quick look through here you might get some ideas (but some are just plain mounting brackets and not useful to reduce vibrations)
Thanks to everyone who replied!
I went ahead and installed rubber grommets.
This may have made a difference because this time I managed to arm (yey!).
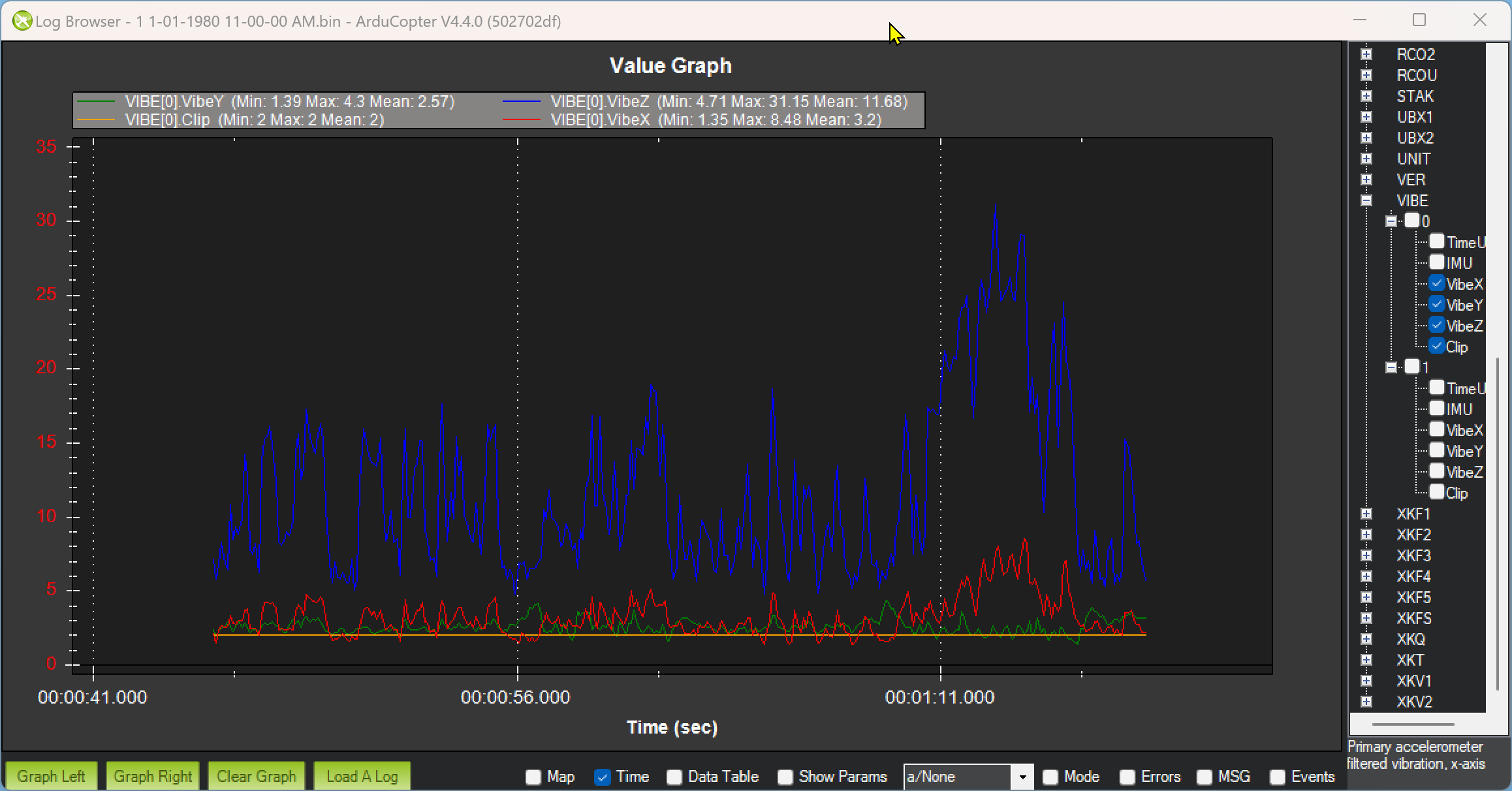
I also discovered PixHawk’s logging feature (yey!) and here is the log I’m seeing.
What do you say? How bad is it?
Great
z-Axis is always expected to be higher compared to the others.
If you could supply is now the .bin file after a short flight (perhaps just hover to be safe), then some of us can provide more suggestion how to improve things.