I am still having massive vibration problems and I can’t seem to get a hold of those.
70cm quad
Turnigy Multistar 4822-390kV
17x5.5 props from eBay seller happychoice2009
APM 2.5 with Copter 3.1-RC5
The props are balanced, the motors seem reasonably vibration free.
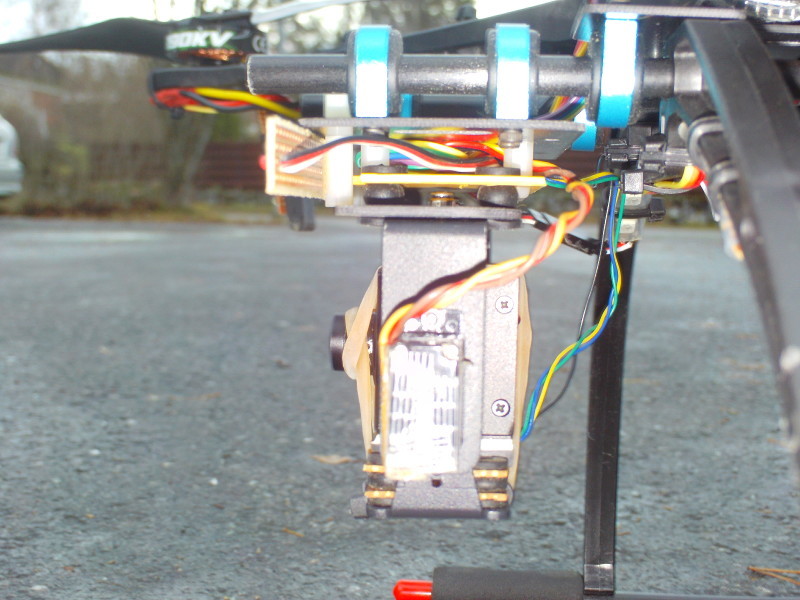
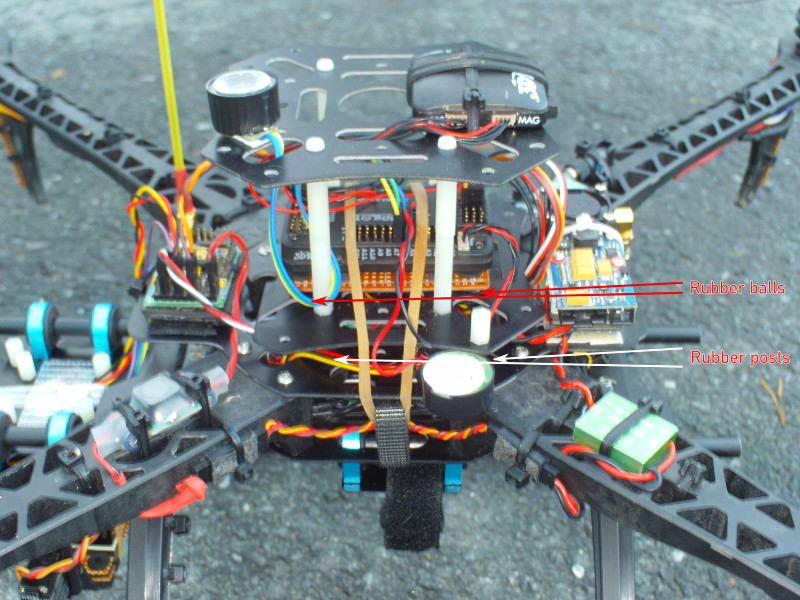
And I’m not talking about fast vibrations as you would expect from bad balancing. It’s more like the copter is shaking. In the onboard video it’s easily visible (s. below) - I don’t have normal jello. The camera mount is suspended with 4 rubber balls and the camera itself is mounted on a plate which again is connected to the tilt mount with 4 rubber balls.
The copter seems to shake mostly on the roll axis but also quite a bit on the pitch axis.
Hi,
I experience the exact same issue. Here the details:
My first octo X8 build was made with 700KV motors and 12x3.8 props. I was using kyosho zeal equivalent tape under APM and a NEX5 brushless gimbal with excellent results. My APM IMU was reporting vibrations below 0.1G
Then i upgraded (thought it was an upgrade) to 400KV motors (tiger MT3515 that are dynamically balanced) and 15x4 props. All other things of the craft remained the same.
Result: three times more vibrations on APM and jello in the NEX5 video. Also very twitchy loiter and impossible auto mode with this level of vibrations.
At the moment i did not identify the root causes of these vibrations. I also do not know how to solve them as I applied all of the vibration control wiki techniques without success.
But for sure this is caused by low KV and bigger props.
I decided to go down to smaller 14inch props to see if that will improve things or not.
I guess APM’s sensibility on vibrations renders it unusable for low KV,big props drones.
I use APM with 14x4.7 props and the Tiger motor mt3515. Absolutely no issues with vibrations. I would suggest looking at other problems with the setup. I did have an issue once with a brushless gimbal that was poorly tuned causing ‘induced’ vibrations. Basically the gimbal P-term was too high, causing a vibration in the gimbal, which was picked up through the frame by the APM. Fixed the gimbal, the ‘vibration’ went away…
Hi Stefan, All,
I think I might see the problem, big props, big slow pancake motors skinny little frame arms.
I’m guessing that if you grab ahold of one of those frame arms at the motor end it doesn’t take too much manual twist to give it a 5 to 10 degree tilt.
And with those big slow high lift props you are probably getting a lot of continual frame twisting.
And of course since the props are never synchronized on a multicopter all 4 arms are twisting out of sync.
I could be wrong and those arms could be stiff as all get out, but I’m guessing not.
And you have a fair amount of weight in the center section which will give the arms something to twist against.
I am interested in high lift slow pancake quadcopter too (I have some RC timer 360’s I am planning on putting into a Carbon fiber Tarot 650 Quad, but the CF is very stiff and will not twist.
Even so, I am expecting that the oscillating moment induced by those big props (I will be using similar to yours) might cause some problems even without frame twist.
For these really big slow prop spinning quads, vibration control is a bit more involved.
Best Regards,
Gary
Thanks Garies . Indeed, the arms twist pretty nicely. I’m now thinking of a new frame - ATG T2-X4 - 68cm dual arm quad frame. That should be reasonable stiff .
Hi Stefan,
That is one sturdy looking frame, I don’t think arm twist will be a problem with that.
One thing though, the additional flat plate area of that dual tube arm passing under your prop might result in a small reduction in thrust and it might produce a bit of vibration from the periodic nature of the prop thrust hitting it.
It is a hard situation especially on big quads with big slow props.
Mostly, copter frame design is not well thought out with respect to frame arms interfering with prop thrust.
A somewhat larger diameter single round carbon fiber frame arm would represent a lot less interference with the prop for both loss of thrust and for vibration issues.
And if you get one that uses quality carbon fiber and good construction, arm flex or twist ought not to be an issue. (I am not sure the Tarot 650 fits that description either).
I also am very interested in building a long endurance large quad with slow motors and big props, but they definitely do have their whole own set of challenges.
Best Regards,
Gary
[quote=“gary”]Hi Stefan, All,
I think I might see the problem, big props, big slow pancake motors skinny little frame arms.
I’m guessing that if you grab ahold of one of those frame arms at the motor end it doesn’t take too much manual twist to give it a 5 to 10 degree tilt.
And with those big slow high lift props you are probably getting a lot of continual frame twisting.
And of course since the props are never synchronized on a multicopter all 4 arms are twisting out of sync.
I could be wrong and those arms could be stiff as all get out, but I’m guessing not.
And you have a fair amount of weight in the center section which will give the arms something to twist against.
Gary[/quote]
This explanation does not apply in my case as I have a VulcanUAV frame made of large rectangular alminum arms and carbon fiber. It is one of the most rigid frame you can find on the market, much more rigid than the tarot one or even cinestar (because the CF plates are not hollowed). I still get high amplitudes low frequency vibrations.
the only way out is to reduce propeller size and increase pitch to keep same lift capacity, for a given weight. In fact you can only increase your prop size if the weight increases enough. I got an expert advise from VulcanUAV who builds low KV/large props crafts for years and it told me that Under 9-10 Kg you should not go above 14 inch props on 400KV motors. This fits my case where my craft is only 7Kg but I wrongly tried 15 inch props on 400KV motors.
I ordered 14x4.7 XOAR props to test if this advise is right and solves my vibrations problems. i will post back results.
Hi Hugues,
Those are some heavy duty frames, very innovative company, their new thrust vectored copter looks very interesting for video applications.
I think big slow props can always be a problem and made greater on relatively light copters.
The reality is that they turn so slow they introduce a significant oscillating moment about the current blade position and when the blade is interfered with by the frame member it creates an additional buffet / turbulence.
Using wing profile frame arms oriented so as to minimize interference with the blade thrust could reduce or eliminate the frame arm problem, but the inherent imbalance provided by current blade position is not so easy to overcome.
Increased number of blades per prop can help, but you eventually get decreasing prop efficiency also.
Improved prop design for multirotor use could help a lot (optimized for static hover use at a specific thrust or vehicle weight).
Basically if you want a big multicopter with big high efficiency slow propellers their are other trade offs.
Best Regards,
Gary
Yeah, one guy on RCG was reporting a crash from 80m AGL with the hexa version and he said, all props but only 1 arm broke.
I’m just wondering - There’s a number of very light (<1kg) big prop/low kV copters in the RCG 95 minutes thread and some of them are used for FPV - with pretty nice video quality…
Hi Stefan,
I think most of those are running heavily loaded more battery for endurance and heavy photo gear for video.
And using decent camera vibration isolation.
The extra weight does help stabilize the central platform and some of them have stabilizers on the central platform.
If you vibration Isolate the battery, the extra mass can do a good job of helping dampen short period vibrations (on the negative if your controller is on it it can make response sluggish).
Trade offs, but the long endurance ones do get some benefits from their extra central mass.
Here is my reporting back with smaller better quality propellers: I got XOAR 14x4.7 propellers. These are wood propellers that are paired in factory and are balanced out of the box. They are also 11g lighter than my previous APC ones.
The result is impressive: vibrations on APM log are divided by a factor of two!
I am now back at my usual 0.15g at hover.
I think I still can improve by replacing my current 3M vibration pads by zeal tape by I do not find any in Europe…
[quote=“gary”]Hi Stefan,
I think most of those are running heavily loaded more battery for endurance and heavy photo gear for video.
And using decent camera vibration isolation.
The extra weight does help stabilize the central platform and some of them have stabilizers on the central platform.
If you vibration Isolate the battery, the extra mass can do a good job of helping dampen short period vibrations (on the negative if your controller is on it it can make response sluggish).
Trade offs, but the long endurance ones do get some benefits from their extra central mass.[/quote]
Not in the thread I was referring to. The “95 minute thread” is all about building rather light quads with low-kV motors an big props for time-records. A few people in this thread compromised a bit and built less light quads for FPV but are still getting well over 30 minutes airtime. I already found out much earlier that the RC-Timer 800 arms are a bad choice for that because they are quite heavy, weighing about 130g each - over 600g for a quad! So with motors, electronics, etc, I get already about 1,8kg for the quad without battery…
Hi Stefan,
As you know from my other posts, I also am interested in big light Quads with big slow props, especially for efficiency.
But I also know that frame twist and even without frame twist, those really slow big props actually rock the copter depending on blade position and since the props are no way synchronized, the rocking motion is - NOT - easy to control.
For us this rocking motion shows up as insidious asynchronous vibration and it is much harder to fully tame than in copters using smaller props at higher speeds.
From what I have been able to glean so far, this kind of a copter actually needs something like a somewhat isolated central mass on which the control sensor stack is mounted.
Basically isolate the platform with your battery and flight controller together but using a long coupled but rapid damping isolation medium tuned to the mass of the battery and then mount the flight controller using a wide spectrum short coupled medium such as Kyosho zeal to that already isolated platform.
It might take some tuning of both sets of mounts to get the proper balance of responsiveness and vibration suppression.
I think that is most especially true for a relatively light, big Quad with slow pancake driven props even with no arm twist.
Basically the characteristics that tend to optimize for efficiency tend to reduce natural stability and increase vibration, so balance of methods becomes a key issue.
Most of these are anecdotal perceptions, but it seems strongly borne out by the experiences of our users.
Best Regards,
Gary
This explanation does not apply in my case as I have a VulcanUAV frame made of large rectangular alminum arms and carbon fiber. It is one of the most rigid frame you can find on the market, much more rigid than the tarot one or even cinestar (because the CF plates are not hollowed). I still get high amplitudes low frequency vibrations.
the only way out is to reduce propeller size and increase pitch to keep same lift capacity, for a given weight. In fact you can only increase your prop size if the weight increases enough. I got an expert advise from VulcanUAV who builds low KV/large props crafts for years and it told me that Under 9-10 Kg you should not go above 14 inch props on 400KV motors. This fits my case where my craft is only 7Kg but I wrongly tried 15 inch props on 400KV motors.
I ordered 14x4.7 XOAR props to test if this advise is right and solves my vibrations problems. i will post back results.[/quote]
As promised I report back on my experiments with other props:
-my issue was : with APC 15x4 props on this sturdy frame I had awful levels of vibrations, although APM sits on gel
-VulcanUAV told me I did not need so big props and that I should get lower ones : 14x4.7 props. I tried that and it indeed reduced vibrations but reduced too much my lifting power capacity at the point I was hovering at 65% (way too weak to benefit from X8 motor redundancy)
-So I decided to get 14x5 XOAR pre-balanced pair of props (on top) and to get 15x5 XOAR pre-balanced pair of props (on bottom)
This solved both my lifting power capacity (hover at 52% which is perfect) and vibrations : back under ±0.1g.
So I conclude that the APC props were the problem. I did use the APC electric props (not the MR model) that have a big central Hub. I could see with a naked eye that their surface was rough and not well finished at all. I tried to balance them but with worse vibrations after balancing than before…
Moral of the story : do not get cheap on props’s quality => get good ones (like the XOAR that I love because they are super rigid and super well balanced, in pairs).
Really good point, I have seen, especially true with big slow props that variances in production tolerances can produce a considerable variance in blade flex.
On my favorite Cheap prop (Gemfan Carbon filled) 8", 9" and 11" are great.
But on the 10" DJI compatible ones the clockwise props blades are at least twice as flexible as the counter clockwise ones.
Completely unacceptable.
Eventually we need to have some serious wiki pages devoted to propeller selection with real world tests and results.
I think, I found the reason for my vibes. On very close inspection, my props look like they have been taken out of the cast before hardened out completely. Almost all have different AoA on the tips and some even have a slight wave pattern through the body.
Bought them from ebay from seller happychoice2009. I ordered a new set from Hobbyking now, hoping to get better QC’d props.
Hello everybody,just for sharing results:
I’m currently working in a long endurance quadcopter,2880 CF propellers,T motor U8 170 kV mounted in cylinder cf arms. As I’m using a pixhawk, good general performance would be expected if vibrations are between ±3 m/s2 in X and Y, and between -5 and -15 in Z. So I attach the logs for 2 bench tests, both with propellers pushing down:
-nº 47 is without any extra weight over the quad
-nº 48: i put like 3 kg over the center plate, just to see what happens
Problem is in nº47 vibrations are between specified limits, but throttle response is not smooth at all (like 200 pwm variation in each channel), so flying is quite difficult.
I’m just trying to figure out how to solve this problem without putting so much extra weight. Maybe just putting the two batteries over the center plate (it doesn’t work same way if weight is placed hanged in the lower plate
( note at the end, at the left corner, as soon as I’ve switched between loiter and stabilize mode, this caused fall, as the stab mode woke up 0.5 seconds before hitting the ground ) …
Here are my basic settings : i.snag.gy/eDHIB.jpg
& pid settings : i.snag.gy/PTIf7.jpg
( binded to channel 6, didn’t notice any change by switching Stabilize Roll kP value … )
Read zilion of things, but I haven’t found the cause yet …don’t know where to get the accelerometer values within the logs …
Thanks for any enlightment
Hi, I finally found out PID settings where there isn’t any parkinson shaking … but sadly, P values are very low … is that dangerous ? i.snag.gy/yyF8J.jpg
Now I try to autotune my quad so it won’t go drift to the left …




 . Indeed, the arms twist pretty nicely. I’m now thinking of a new frame - ATG T2-X4 - 68cm dual arm quad frame. That should be reasonable stiff
. Indeed, the arms twist pretty nicely. I’m now thinking of a new frame - ATG T2-X4 - 68cm dual arm quad frame. That should be reasonable stiff {kind=link}
{kind=link}
{kind=link}