Hi users,
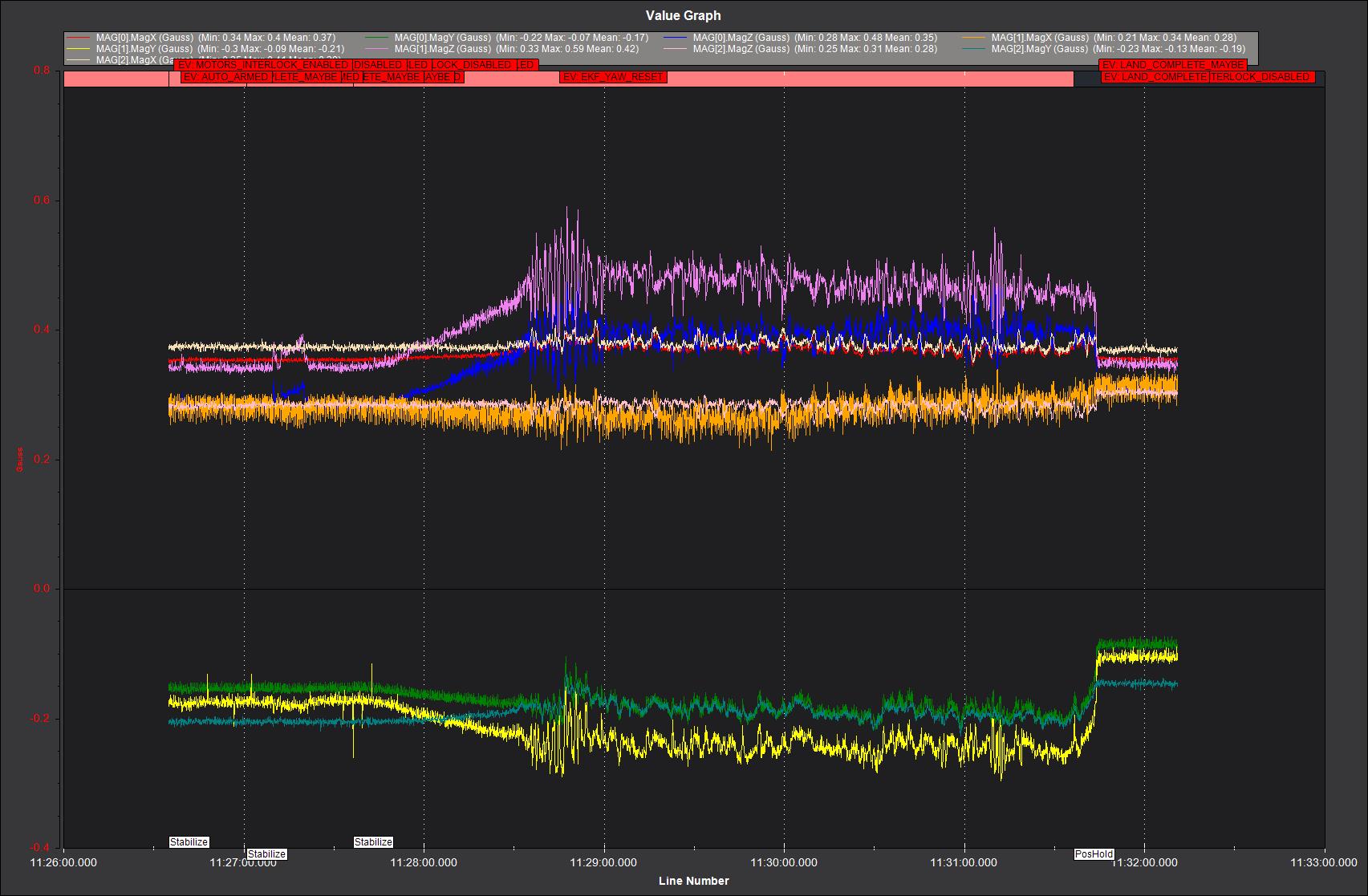
I was doing the flight test of M1000 drone with Pixhawk cube (black) as flight controller. First I have taken the flight in stabilize mode, the flight gone quite good in this mode. After 4-5 minutes of flight I have put the drone in position hold mode and suddenly I have heard continuous beep from the drone and seen the compass was orange on the EKF STATUS in the Hud display of the Mission planner. At that moment My throttle command was slightly down and I was scared , but the drone was landed safely .
The flight log link of the corresponding flight is given below with this post. As I am willing to do give missions to the this drone , please suggest me whether flying the drone in position hold mode would be safe or not. And please suggest me whether I need to modify any parameters or not.
Log link:
https://drive.google.com/file/d/1Uj1W84X6QKns5gCbjCwLHPMR92_ptJkD/view?usp=sharing
Note: In the log no warning or nothing is showing.