As title. This frame had a vertical oscillation on 3 cell when using version 3.5. I found a cure for it by lowering Throttle accel P and I. Seemed ok with 3.6 rc2, till I tried a 4 cell lipo. Now it has severe vertical oscillation. The throttle accel section in parameters are greyed out.
Can someone tell me which parameters I should adjust in 3.6
More voltage is like more Kp gain, try lowering it for 4S.
Do you mean PSC_ACCZ_P ? If I’ve got the correct parameter, 3.5.5 had a minimum value of 0.0, but 3.6 only allows down to to 0.5. Or have I got the wrong parameter, sorry I’m not too sure what Kp refers to.
Thanks oz ozzy, I was barking up the wrong tree. Set the P’s and I’s down a bit till I got it flyable on 4 cells, then did a roll and pitch autotune. Felt just about right after that. The interesting thing was that autotune set the ATC_RAT_ROLL_P to under 0.05, which is the minimum which I could not go under previously. It now lets me edit the value, with a warning that it is under the minimum allowed. A reboot shows that it has kept the new value.
Still need to do some fine tuning to eleminate a shaking just at the point of takeoff.
The point of the excercise is to see whether 3S 5200 or 4S 4000 gives the longer flight time. Thanks again.
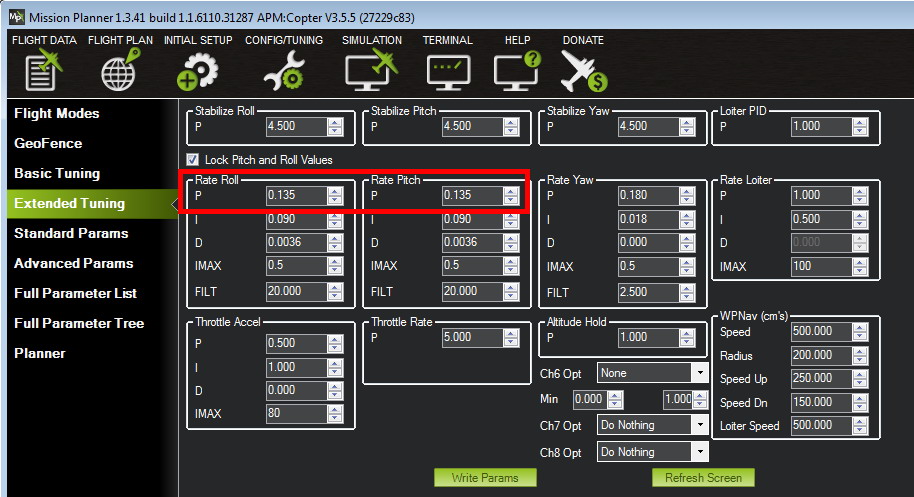
A note to the DEV’s, the lowest you can set Kp in the picture above is 0.05, while this must be fine for most quads, its it just to high for mini quads. Yes I figured it out you can dig through the full parameter list and punch in lower numbers (with warnings) and get to where they need to be, but, just make the new low of 0.01 in extended tuning, it will save a lot of time for newer pilots with decent preformance quads. I am down to 0.03 on a two year old quad that is lacking thrust at 9:1 compared to the newer quads above 13:1 Thanks!
That’s a Mission Planner issue not an Ardupilot one.