It’s supposed to be BL Heli_32 . I’m not 100% sure how to wire this to the Pixhawk Servo Pins. I have all the settings set in mission planner to enable BL Heli Passthrough to servo’s 9-12 . I’m just not how to wire the ESC to the Pixhawk , if anybody has an idea i would be glad to hear it .
Thanks in advance
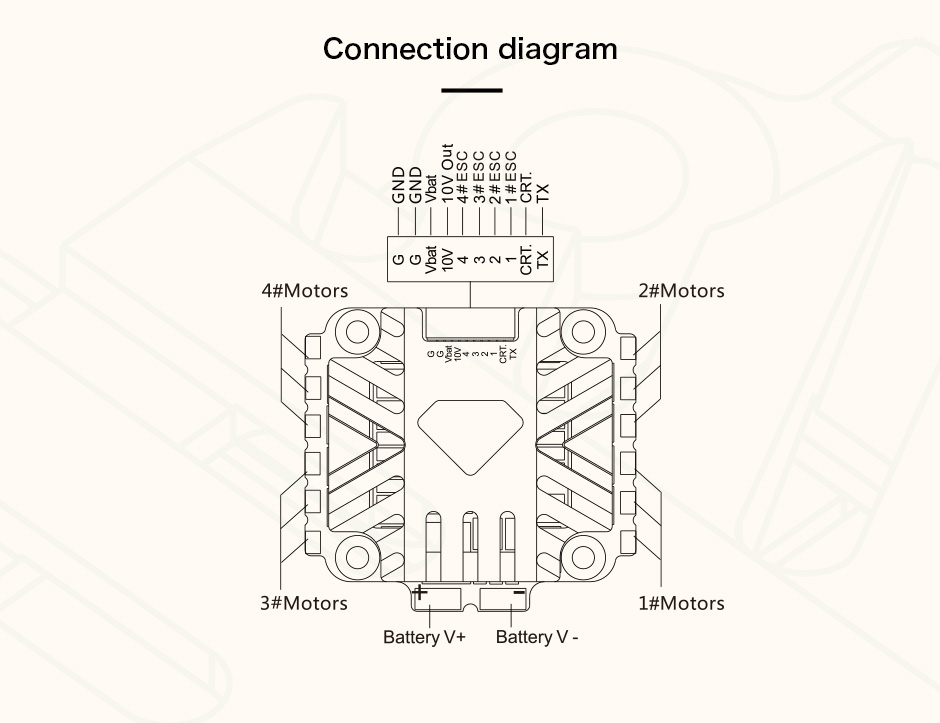
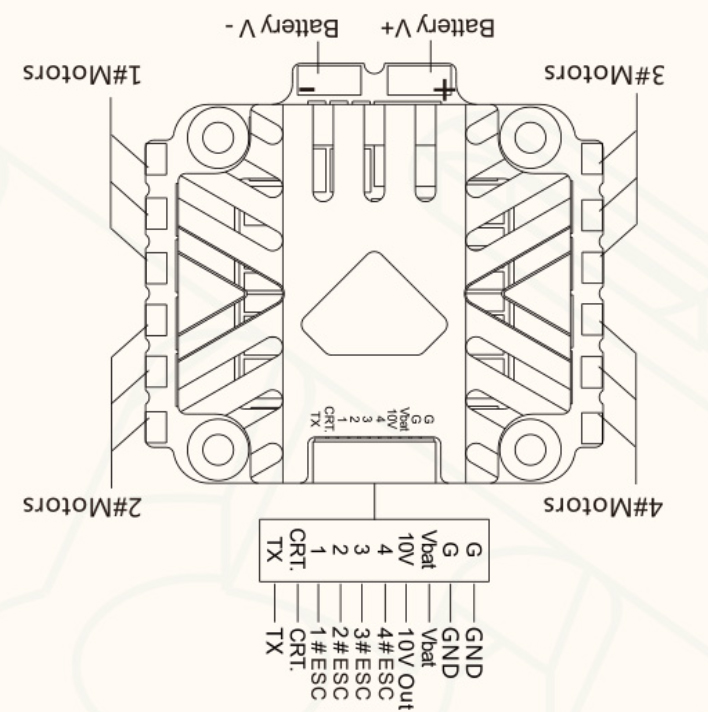
#1-4 ESC connects to signal 9-12 (AUX 1-4) pins on the Pixhawk. Tx is ESC telemetry and connects to a Serial port Rx pin (Telemetry 2 for example). CRT is the total current output voltage equivalent. This connects to the Current pin on the power connector. Manually configure the SERVOx_FUNCTION 9-12 as Motors 1-4.
A hint. If the orientation of that ESC is with the Battery pads towards the rear of the craft you will have an easier time of Motor Ordering if you select FRAME_TYPE as BetaFlight X (12). As always use Mission Planners Motor Test function to check order and rotation.
Thanks for your help Dave, I’ve read on the forums that a ground wire from the ESC also needs to connect to a ground pin on Pixhawk. would that be four ground wires for for each ESC 1,2,3,4. A signal and ground wire for each servo or just a signal wire to each servo and one ground wire to a ground pin.
You only need one ground lead or depending on how your power system is setup no ground lead. But run one from one of the ESC Gnd pins to any Ground pin on the servo rail. How are you powering the Pixhawk?
OK, good. Then you have battery current already and don’t need the ESC current pin output. Chances are that ESC will not have current available in ESC telemetry but you will have voltage and RPM.
One more question Dave , you mentioned the frame type ,if my ESC Battery tabs were facing the rear. They are actually facing the front of the drone, so should I still use the BetaFlight X ?
Thanks again.
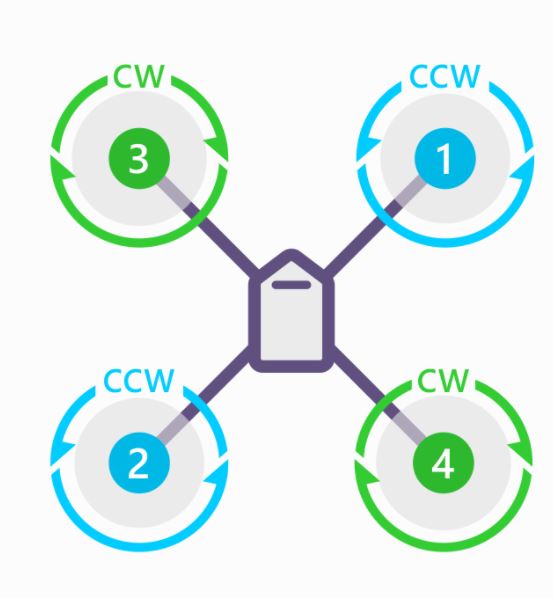
No, don’t bother then. Just use normal X and you will have to re-order the motor outputs to suit. As I mentioned use the Motor Test Function in Mission Planner and re-order as required so it’s correct.
This is what you have then. So I supoose you will have to swap 1&3. Use BLHeliSuite to reverse the motor directions as required.
yes thats it , ok in BL Heli 32 suite which interface should I use to connect via the usb connection on the pixhawk. , the Betaflight/Cleanflight or USB/COM or 4 Way If.
Betaflight but it should recognize what it’s connecting to. The only 2 parameters you should have to set for passthru to work are:
MOT_PWM_TYPE (pick a Dshot protocol)
SERVO_BLH_AUTO (1)
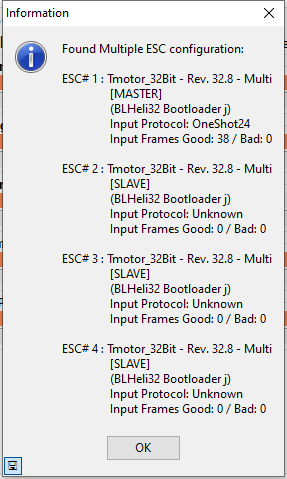
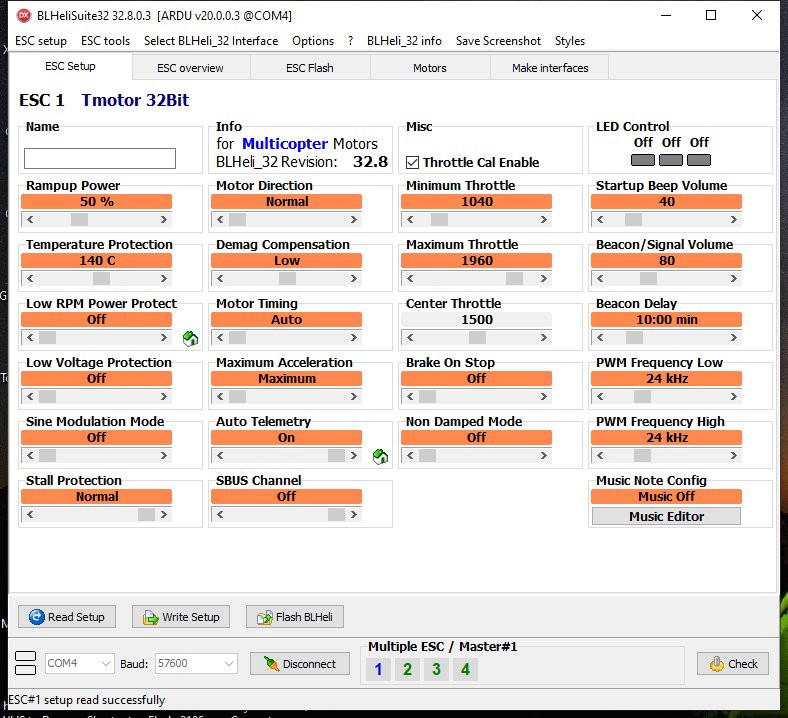
ok so I had the ESC wired up before, with a ground wire and signal to each of the servo outputs. When I had it wired that way ,I was able to connect to the ESC via BLHeli 32 suite and flash the latest 32.8 BlHeli.I was getting differant reads outs at different times.
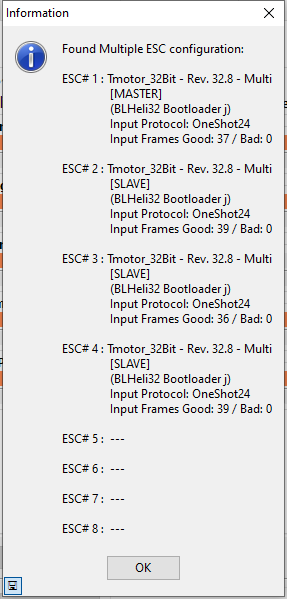
This screen shot shows Oneshot24 as the input Protocol on only the Master ESC!
Then I would reboot the pixhawk and check againin BLHeli suite and the input Protocol would changed