I was trying to configure the failsafe for my drone. My objective is to make my drone go to RTL mode when the controller signal is lost. I also want it to directly return home during mid-flight.
I configured the parameters, flew my drone around 2-3 meters height, and shut down my controller. However, instead of maintaining the same altitude and going to RTL mode, the drone disarmed or reduced the throttle to zero, causing it to fall/land on the ground. Afterward, it entered to RTL mode (autonomously) and flew up, landing back where it had taken off.
So, the failsafe somehow works, but I think it’s supposed to go to RTL mode instead of disarming itself at the start?
My [FS_THR_ENABLE] parameter is 1, and my failsafe throttle in my controller settings is equal to %15.
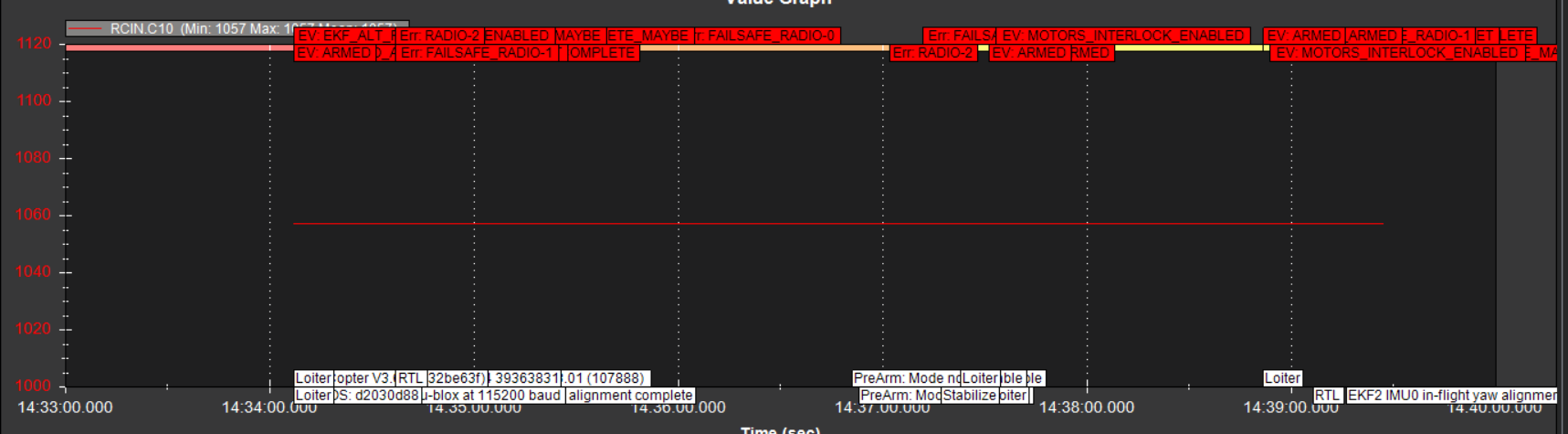
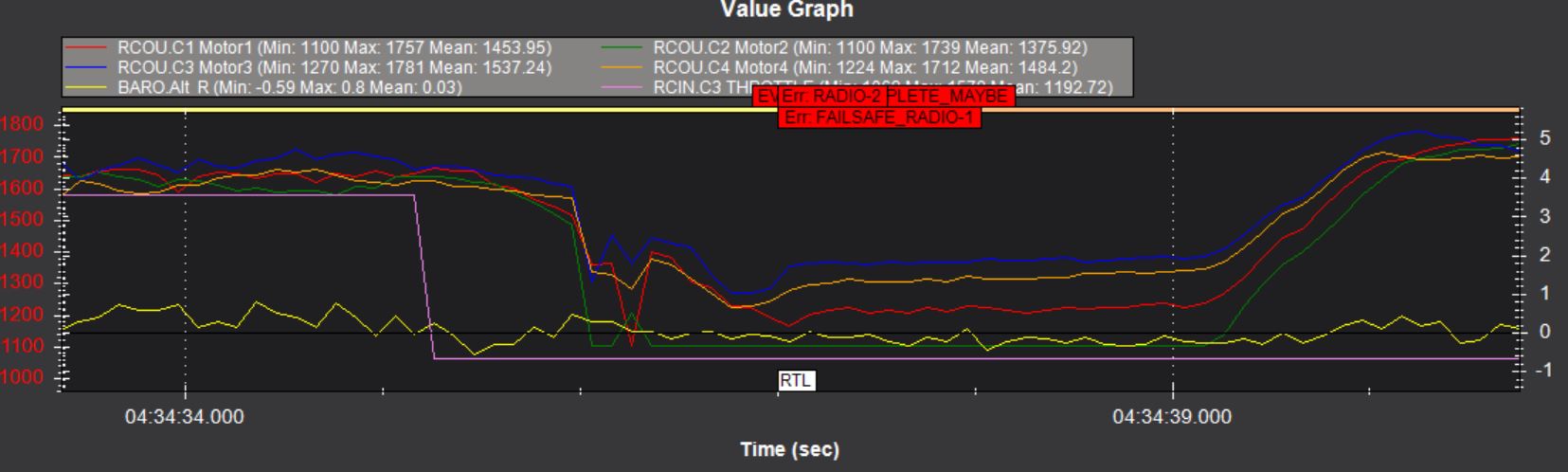
You can see my altitude and information about the modes in the log image below.
Edit: I think it might caused by the motor switch that I added to one of the switches in my controller. (EngineRunEnable) It sets the motors off when I switched off. Do you think could it hit the zero when I close my controller?
It did take awhile before RTL was triggered after the loss of throttle signal. I’ll take another look.
Well, it was 2 seconds from shut off and RTL and there was “Land Complete Maybe” message in there. So, it wasn’t sure if it had landed or not decided not and started the RTL process.
I would suggest updating to current Stable version and simply disable the internal compass. If you do make sure that EK3 is enabled and EK2 is disabled and then start from the Initial Parameter setup which you have not done here. This craft shouldn’t be flying at all in this default condition.